10 - Motori ed equipaggiamenti per la trazione elettrica - VIT
10 - Motori ed equipaggiamenti per la trazione elettrica - VIT
Nel caso di trazione elettrica, la corrente è captata dalla linea aerea di alimentazione e raggiunge i motori attraverso opportuni equipaggiamenti di trazione.
Il circuito di trazione si chiude attraverso le rotaie che consentono il ritorno di corrente alla sottostazione che alimenta la linea.
Elettrificazione delle ferrovie
L'alimentazione elettrica da rete fissa non è unificata in ambito europeo. Ogni rete ferroviaria ha storicamente operato scelte diverse.
Il motore a collettore nonostante il costo, la delicatezza e l'elevata manutenzione, è stato a lungo la scelta ottimale.
In paesi come Italia, Belgio, Spagna e Polonia fu adottata la tensione nominale di
Altri paesi, come la Francia, limitarono per prudenza la tensione a
L'avvento dell'Alta Velocità (AV), con potenze unitarie di oltre
Si è adottato quindi un sistema a AC monofase a
Motore in Corrente Continua
Il motore a corrente continua (CC) si basa sulle forze che nascono in un conduttore percorso da corrente immerso in un campo magnetico.
Infatti, preso un conduttore rettilineo di lunghezza
Il motore in CC è costituito da
- #Rotore o INDOTTO: Un corpo cilindrico solidale a un albero, libero di ruotare
- #Statore: Una parte fissa
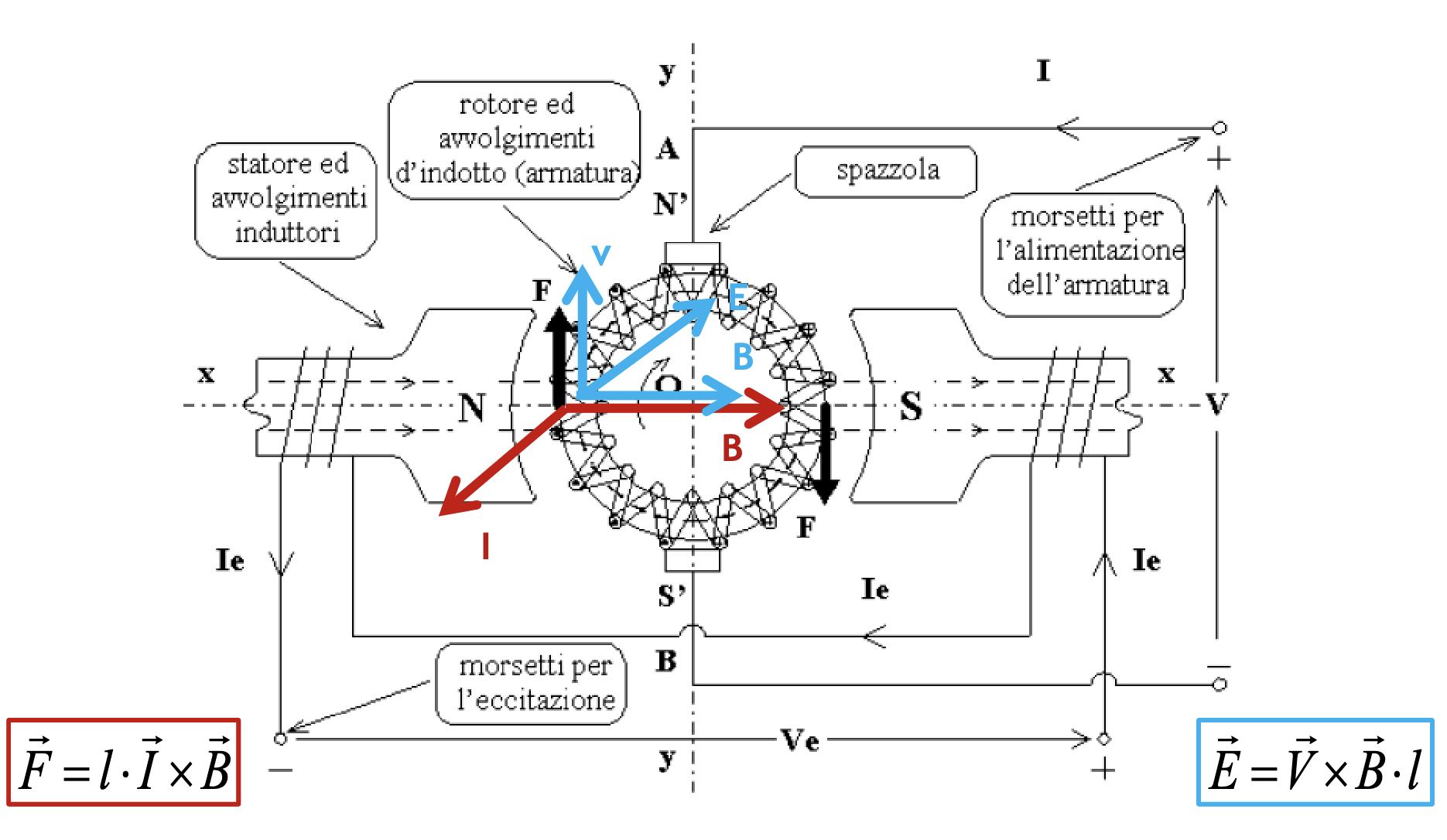
Le spire del #Rotore sono quindi percorse da una corrente
Ogni spira è pertanto soggetta a una forza di intensità
Poiché nella rotazione i conduttori del #Rotore tagliano il campo magnetico, per via della variazione di flusso viene a generarsi una Forza Contro-elettro motrice (una differenza di potenziale) che dipende dal numero di giri al minuto (
dove
Questa
Secondo la Legge di Ohm si avrà quindi che
dove
Tensione di alimentazione Forza contro-elettro motrice Resistenze del circuito
Se si moltiplicano entrambi i membri per la correntesi ottiene la potenza del motore:
che riscrivo come
dove:
- Potenza assorbita trasformata in potenza meccanica del motore - Potenza dissipata per effetto Joule - Potenza fornita al motore
In definitiva quindi
In un motore elettrico a corrente continua la potenza meccanica del motore è data da
Ricordando poi che la tensione
Ora, essendo
La velocità angolare
essendo
A questo punto posso scrivere la coppia del motore elettrico in corrente continua come
essendo
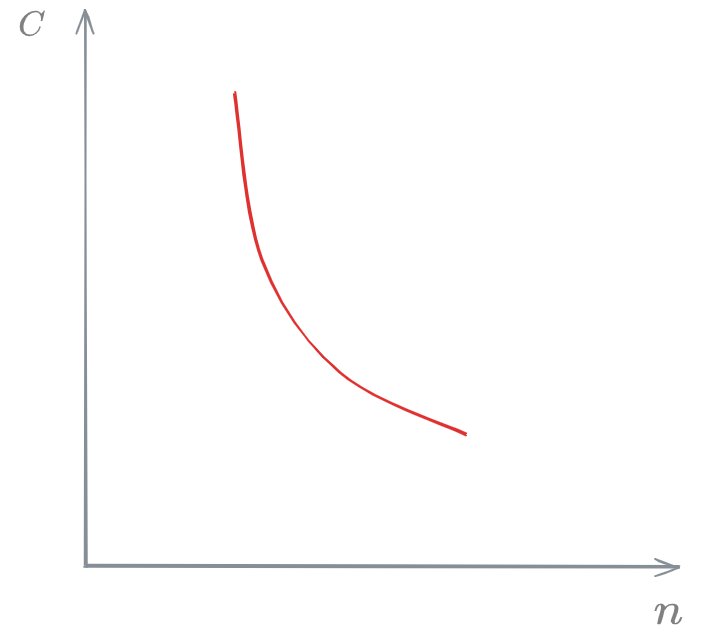
Si può quindi graficare la caratteristica meccanica del motore elettrico in CC essendo
Se aumenta la corrente
L'andamento della caratteristica meccanica del motore in CC si avvicina molto a quello di un'iperbole. Nel caso di iperbole avremmo proprio potenza costante, e quindi caratteristica ideale.
Questa in realtà è più decrescente di quella ideale: a parità di numero di giri
Si noti che l'andamento della curva deve essere limitato sia superiormente che inferiormente:
- La coppia deve essere compatibile a rispettare i limiti di aderenza
- Il numero di giri non può superare la resistenza dei componenti meccanici del motore
- È necessario un meccanismo di regolazione: spostare la caratteristica nel piano
in relazione alle varie condizioni di moto.
Rotore
Il rotore, o indotto, è costituito da lamierini di ferro e da conduttori di rame all'interno dei quali circola la corrente.
I conduttori sono a forma di spira le cui estremità terminano sull'albero.
L'insieme di tutti i contatti elettrici di tutte le spire del rotore prende il nome di collettore.
Il contatto elettrico tra l'albero (estremità delle spire) e la sorgente di alimentazione fissa, essendo il primo in movimento rispetto a quest'ultime, è assicurato mediante SPAZZOLE striscianti sul collettore.
Questo è uno dei punti deboli del motore CC in quanto le spazzole e il collettore sono soggetti a usura meccanica.
Statore
Lo statore è costituito da un cilindro di ferro al cui interno ruota il #Rotore.
La funzione dello statore è di creare il campo magnetico in cui è immerso il rotore. All'interno dello statore si trova pertanto una serie di spire collegate alla sorgente di corrente elettrica.
I circuiti delle spire dello statore e del rotore possono essere lo stesso circuito e quindi collegati in serie oppure in parallelo. A seconda del tipo di collegamento, cambia la #Caratteristica meccanica del motore.
Motore Asincrono in corrente Alternata Trifase
https://youtu.be/7O_dxw1RXxg?si=X-v7FChN0vhAdfu8
Si tratta di un tipo diverso di motore dal #Motore in Corrente Continua. Uno dei vantaggi principali è quello di non avere contatti elettrici fisici tra elementi fissi e in movimento (non ha spazzole) e questo garantisce una maggiore durabilità.
Si tratta di un motore asincrono alimentato in corrente alternata trifase.
I sistemi di alimentazione elettrica nelle reti ferroviarie oggi sono però in CC o in AC monofase. Occorre pertanto installare, a bordo, una macchina elettrica, statica o dinamica, che trasformi la corrente continua in alternata trifase.
Questa operazione è eseguita da un dispositivo chiamato #Inverter. Quest'ultimo interrompe periodicamente la corrente continua in ingresso regolando la durata delle fasi di interruzione e di quelle di conduzione in modo che la corrente risultante sia alternata.
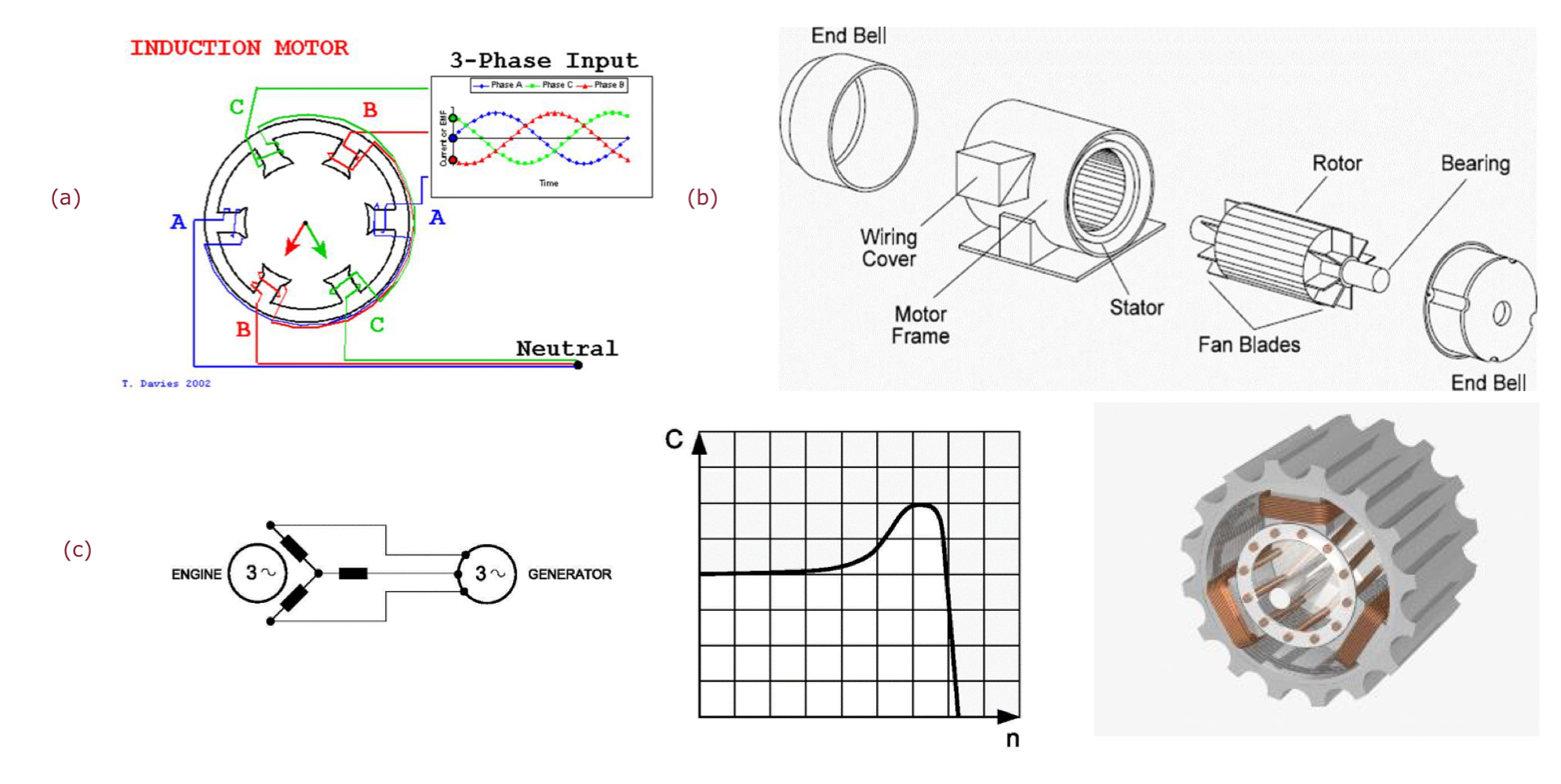
Il motore è detto asincrono in quanto la velocità angolare del rotore è inferiore alla velocità di rotazione del campo magnetico generato dallo statore.
In genere lo statore presenta un numero pari di avvolgimenti. Per un motore trifase ci saranno quindi almeno 6 avvolgimenti in tutto. In questo caso, le coppie polari sono sfasate a 120° fisicamente ed elettricamente.
Negli avvolgimenti dello statore si verifica il passaggio di correnti (alternate) le quali inducono un campo magnetico complessivo che ruota nello spazio.
Questo campo magnetico induce nel rotore una f.e.m. e quindi il passaggio di correnti elettriche che, a loro volta, inducono anche nel rotore un campo magnetico rotante.
Nel rotore è presente un certo numero di fasi chiuse in corto circuito --> rotore a gabbia di scoiattolo.
La rotazione del campo magnetico di statore avviene a una velocità fissa
Il rotore ruota a velocità
In realtà, la velocità di rotazione del rotore
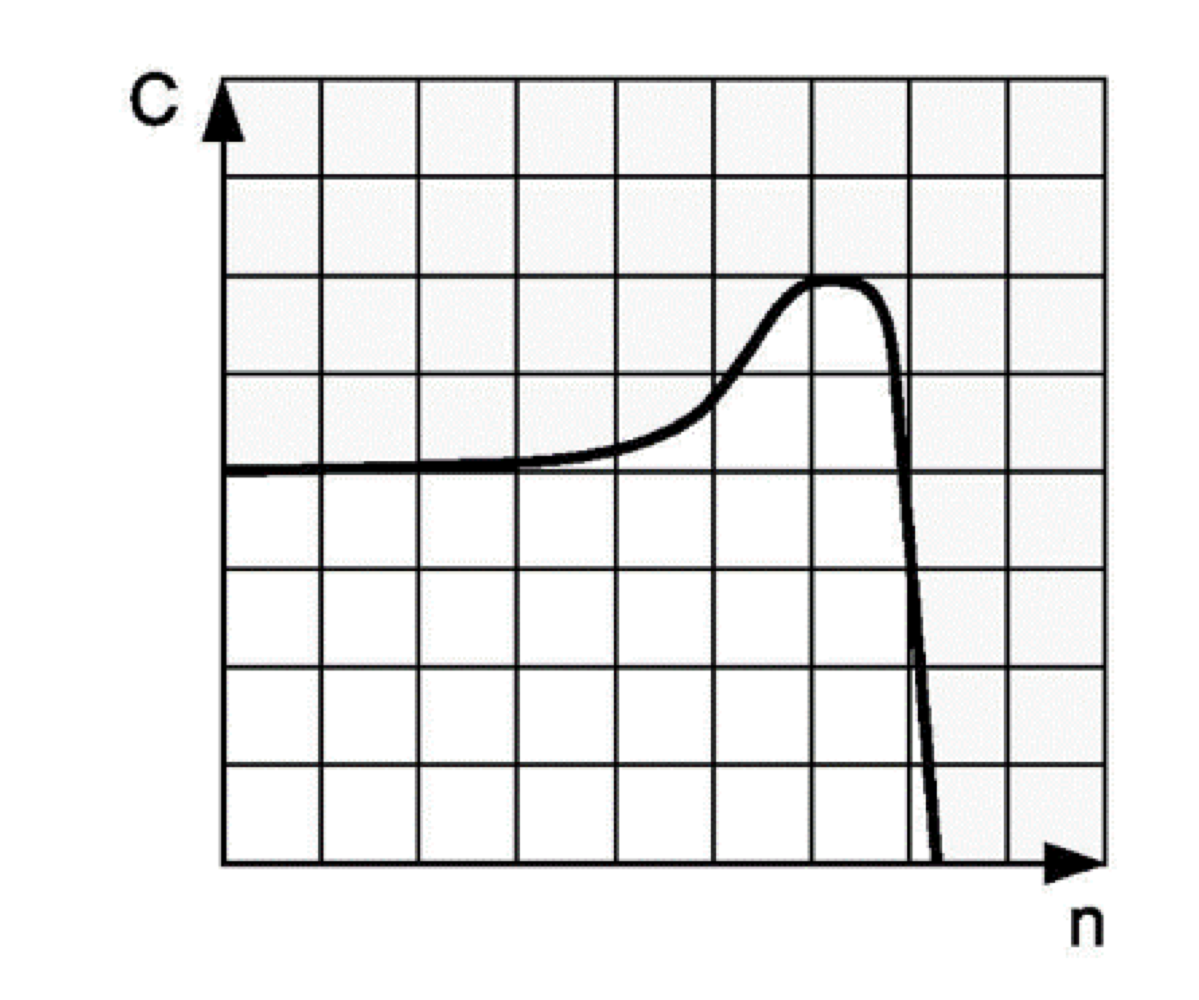
La caratteristica meccanica del motore asincrono trifase, dipende da
- Tensione di alimentazione
- Frequenza di alimentazione
- Numero di coppie polari che creano il campo magnetico
Fissati questi parametri, si può tracciare la caratteristica meccanica di questo motore in funzione della velocità di rotazione (grafico sopra).
Rispetto al #Motore in Corrente Continua questo presenta due vantaggi sostanziali:
- La coppia ha valore finito a velocità nulla --> non sono necessarie particolari regolazioni in avviamento
- La velocità ha valore finito a coppia nulla --> è impossibile che la velocità possa andare oltre il limite di resistenza del motore (fuori giri)
Si noti però che, a parte questi elementi, questa caratteristica meccanica non è adatta alla trazione. Infatti, non consente un adattamento della velocità a condizioni diverse di marcia (praticamente è a velocità costante) a meno di non intervenire sui parametri dell'alimentazione (frequenza e tensione).
Per questo, il motore asincrono viene regolato in 2 fasi:
- Forza costante: con un #Inverter si fa variare la frequenza e la tensione per avere una coppia costante
- Tensione costante: con un #Inverter si fa variare la frequenza e quindi la coppia
Motore Sincrono in Corrente Alternata Trifase
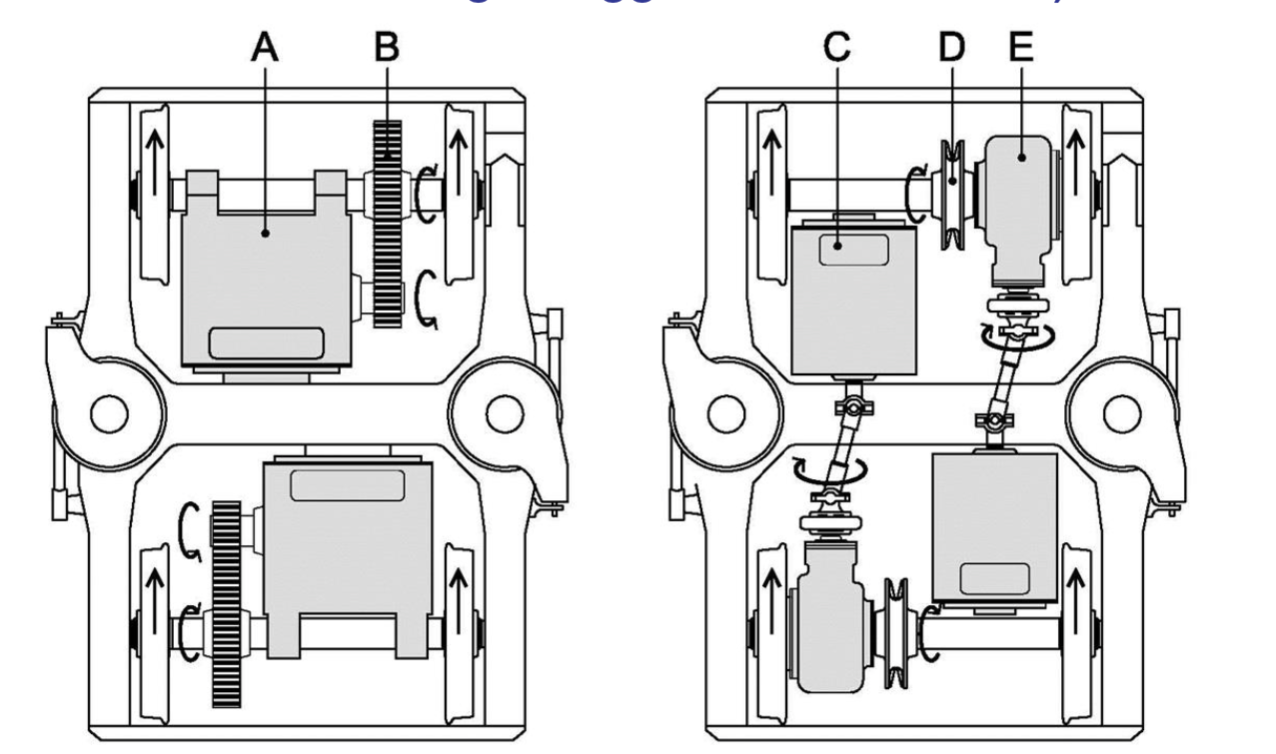
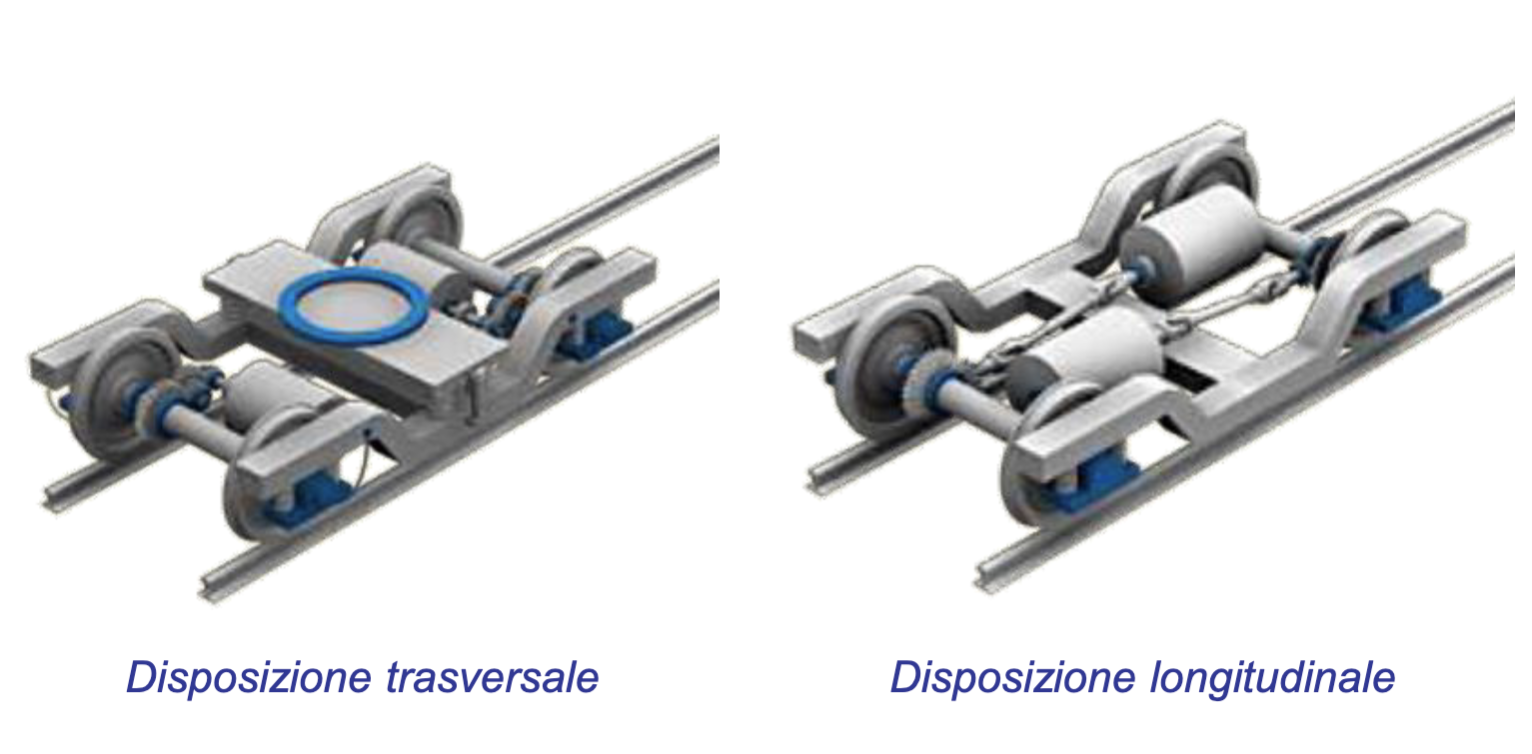
Disposizione dei motori in un carrello
Azionamenti per la trazione elettrica
Si definisce azionamento l'insieme costituito dai motori elettrixi di trazione edalle relative apparecchiature di controllo e regolazione.
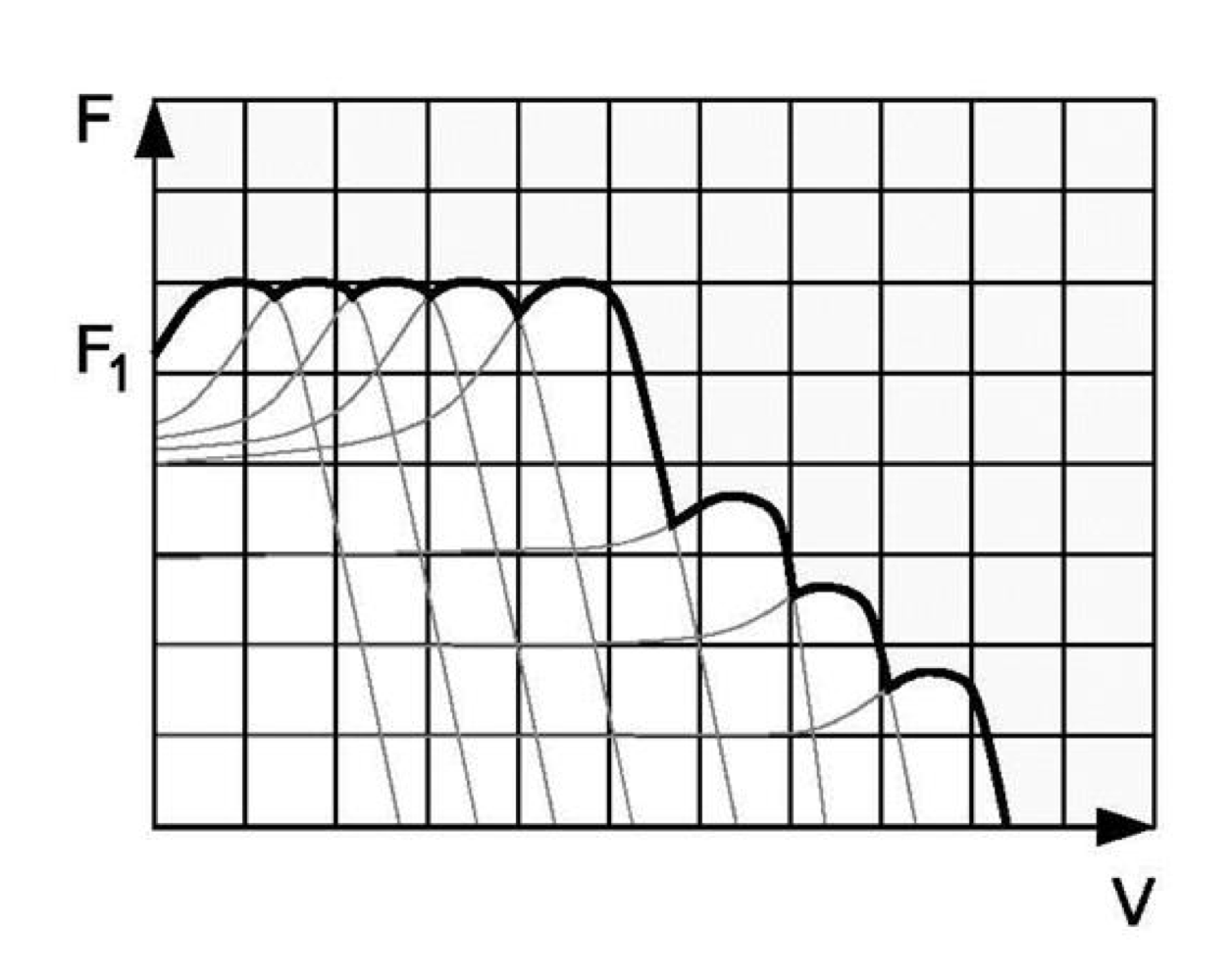
Gli azionamenti hanno la funzione principale di esercire il mezzo di trazione nelle varie condizione di moto approssimando il più possibile la caratteristica ideale a potenza costante.
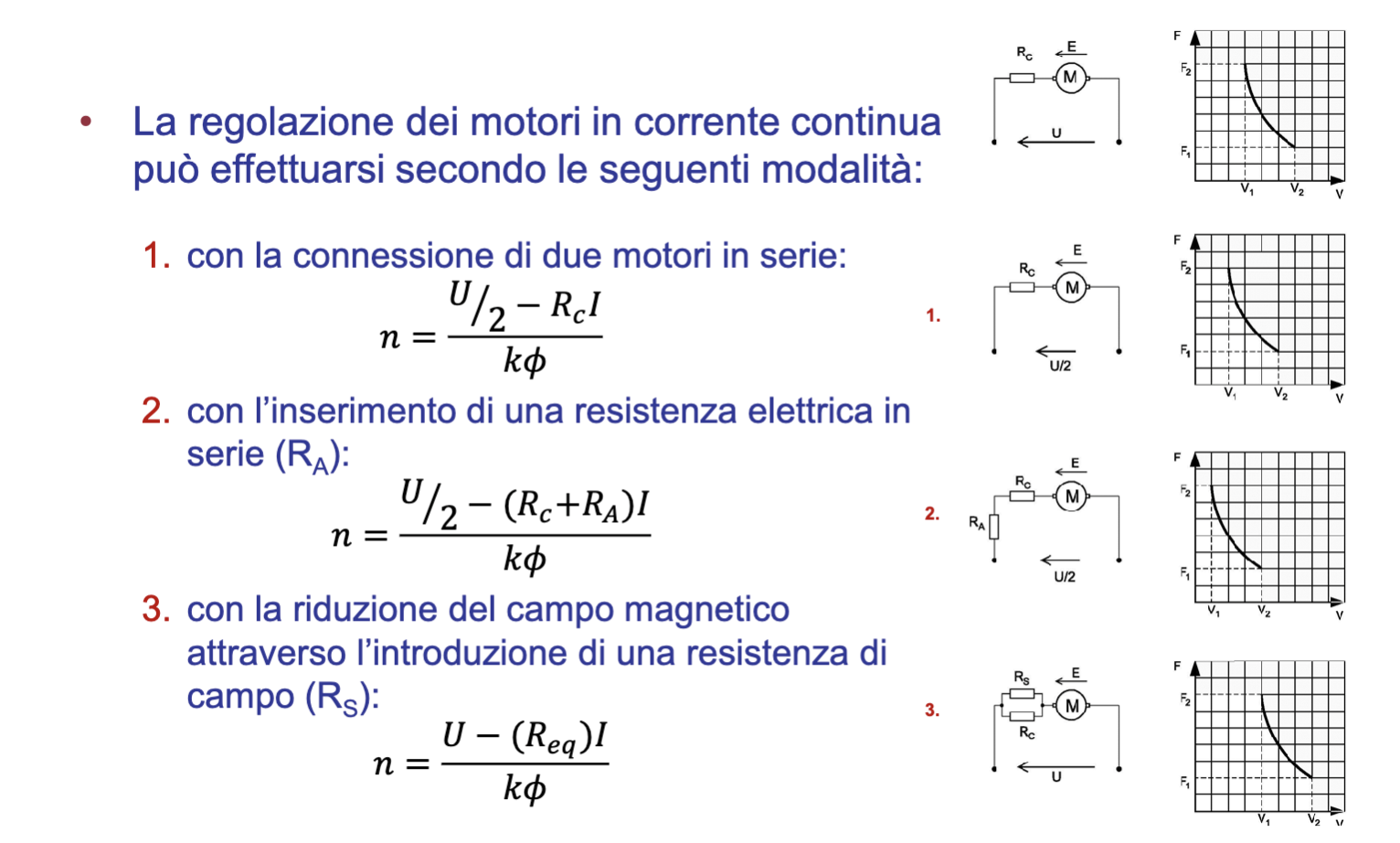
Azionamenti in Corrente Continua
Inizialmente i [[#Motore in Corrente Continua]] erano eccitati in serie (stessa corrente su rotore e statore).
La regolazione in questi motori avveniva storicamente modificando sia il circuito interno della macchina elettrica sia il circuito in cui essa era inserita.
Si parla pertanto di #Regolazione circuitale o a contattori. Tale tipo di regolazione da luogo a caratteristiche discrete.
Regolazione circuitale o a contattori
Questa regolazione si basa su pacchi di resistenze che vengono gradualmente escluse con l'aumento della velocità al fine di controllare la corrente e quindi la coppia (regolazione reostatica).
Altrimenti, nel caso di più motori a bordo, usando diverse combinazioni si possono variare, a parità di corrente, la tensione e la velocità (regolazione in serie/parallelo).
Chopper
La disponibilità di tiristori al silicio ha consentito la realizzazione di convertitori elettronici (statici) in grado di regolare il valore della tensione in un circuito di potenza in CC.
Nacque così un convertitore elettronico di alta potenza chiamato chopper o frazionatore.
Questo è capace di regolare la velocità in modo continuo, eliminando gli strappi che si verificano nella #Regolazione circuitale o a contattori.
Inoltre, questo tipo di azionamento migliora il rendimento energetico, non essendoci energia dissipata in resistenze.
Vantaggi del chopper
- Regolazione continua
- Risparmio di ingombro, peso e usura
- I motori possono essere configurati nella combinazione corrispondente alla massima tensione sostenibile
Principio di funzionamento del chopper
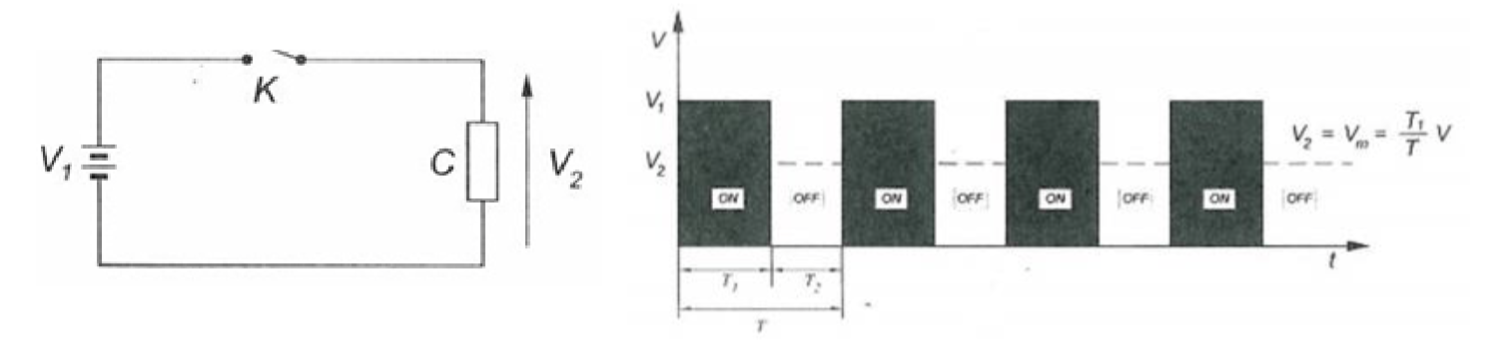
Si hanno a disposizione:
- Una sorgente di tensione continua
- Un interruttore
- Un carico
SI può immaginare di aprire e chiudere l'interruttore
Si ottiene una forma di onda fatta da una successione di impulsi rettangolari - come se l'interruttore avesse tagliato a fette (chop) la tensione di alimentazione.
Si distingueranno quindi:
Intervallo di conduzione Intervallo di interdizione o di blocco
L'intervallo
Il chopper, a seconda che la tensione in uscita sia superiore o inferiore a quella in ingresso può essere elevatore o abbassatore.
Azionamenti in corrente alternata
Il #Motore Asincrono in corrente Alternata Trifase presenta alcune problematiche
- Caratteristica meccanica stabile solo in un campo ristretto
- Valore della coppia di avviamento molto minore della coppia max
- Coppia che varia col quadrato della tensione --> soggetta alle frequenti variazioni di tensione della linea di contatto
La regolazione di questo motore si effettua mediante un dispositivo chiamato #Inverter
Inverter
Ha lo scopo di aggirare gli aspetti negativi del #Motore Asincrono in corrente Alternata Trifase:
- Caratteristica meccanica stabile solo in un campo ristretto
- Coppia di avviamento molto minore di quella massima
- Coppia variabile con il quadrato della tensione e quindi sensibilmente soggetta alle variazioni di tensioni in linea
L'inverter (o convertitore statico) è in grado, usando i tiristori, di convertire una tensione continua in alternata.
Principio di funzionamento dell'inverter
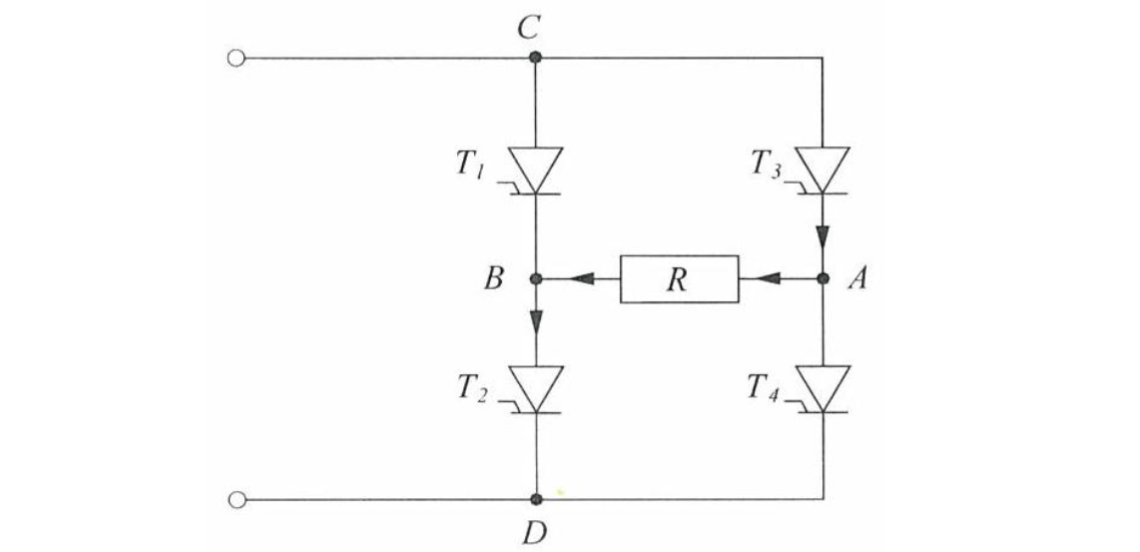
L'inverter monofase funziona accendendo e spegnendo opportunamente dei tiristori in un circuito tipo quello mostrato in figura in modo da variare i valori di tensione e il verso della corrente a seconda della configurazione.
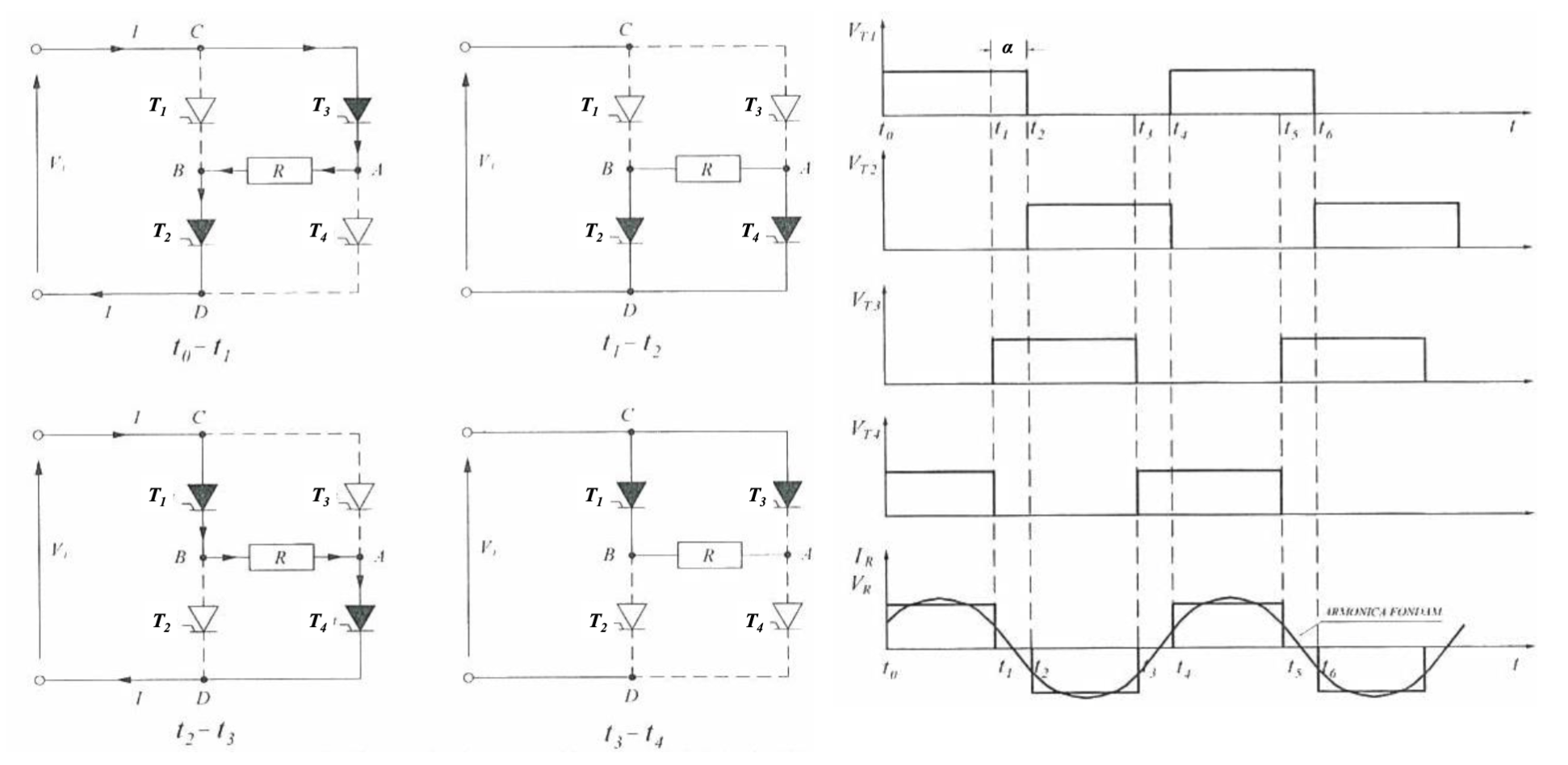
Si noti che a seconda delle configurazioni di tiristori (accesi o spenti) cambia il verso della corrente sul carico
Sono spenti i tiristori
Sono spenti i tiristori
Sono spenti i tiristori
Sono spenti i tiristori
Ripetendo il processo sopra descritto in modo ciclico e con opportuni intervalli temporali si può ottenere un andamento di corrente alternata.