07 - Energia necessaria al moto per veicoli terrestri - VIT
07 - Energia necessaria al moto per veicoli terrestri - VIT
Altri libri di riferimento:
- Ingegneria dei sistemi ferroviari - tecnologie metodi ed applicazioni, egaf
- Orlandi Alessandro, Meccanica dei trasporti, ???
- Leuzzi V., Fondamenti di trasporti - Appunti delle lezioni, facoltà di ingegneria di Roma
- Scarponi P., Malavasi G., Fondamenti di trasporti - Applicazioni, Facoltà di Ingegneria di Roma
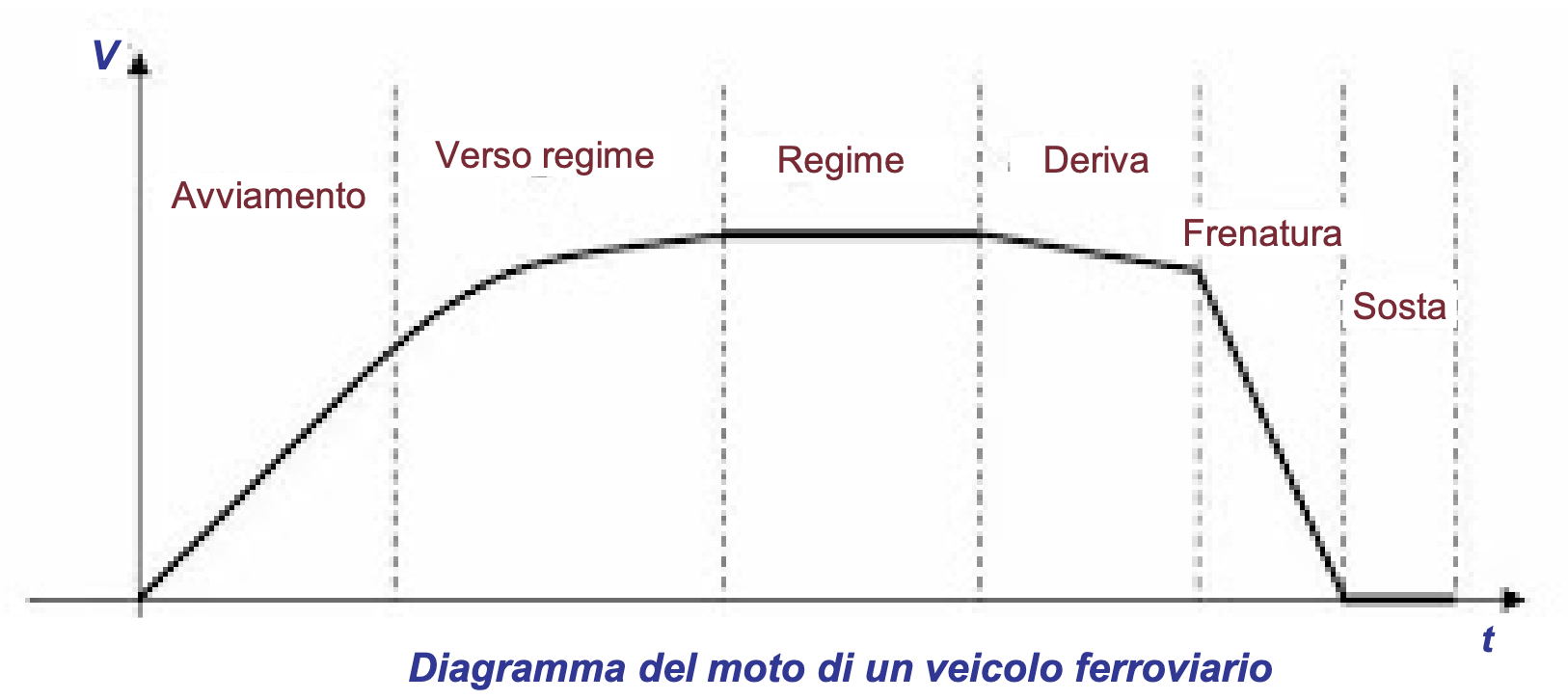
Diagramma Elementare del Moto
Forze sul veicolo in movimento
- [Forze motrici]
- [Forze Frenanti]
- Resistenze ordinarie
- Resistenze addizionali
Fasi di sosta
Si hanno quando
Fasi di movimento
Si hanno quando
Possono quindi verificarsi 4 casi:
L'obiettivo è quello di risolvere l'equazione generale del moto:
dove:
Velocità e Accelerazione Sforzo di trazione Resistenze ordinarie (rotolamento e aerodinamica) Resistenze addizionali (livelletta e curva) Massa equivalente (che tiene conto di tutte le inerzie) Coefficiente di maggiorazione delle masse rotanti
- Perché dalla slide 92 non c'è più
ma poi ricompare nella 96?? - Formule prese da fonti diverse con diverse approx. Dovrebbe esserci semrpe.
- Nella slide 96, la trazione e la resistenza sono calcolate in
? Se no, come posso levarle dall'integrale????????? - Esatto
Soluzione dell'equazione generale del moto
Per conoscere il moto di un veicolo dobbiamo risolvere l'equazione generale del moto. Per farlo la riscriviamo nella forma:
che si può risolvere per separazione di variabili:
Questa andrebbe quindi integrata analiticamente restituendoci la funzione
In realtà è di nostro interesse conoscere la funzione
possiamo riscrivere
Poiché però le resistenze e la trazione dipendono dalla velocità e di solito non conosciamo analiticamente questa dipendenza, dovremo fare uso di alcuni metodi numerici per risolvere l'equazione non analiticamente ma sfruttando metodi di risoluzione alle differenze finite.
Potremmo principalmente adoperare 3 metodi distinti:
È infatti noto il diagramma
Metodo
Consiste nel partire da intervalli finiti di velocità.
Si scelgono
Si hanno quindi le seguenti grandezze:
Possiamo quindi ricavare il valore medio dell'accelerazione nell'intervallo
Una volta ricavata la
dove il fattore
Si ricava quindi anche lo spazio percorso nell'intervallo di tempo considerato:
Facendo questa operazione si sta considerando la velocità costante e pari a
Siccome ho già supposto che l'accelerazione sia costante quando ho calcolato l'intervallo di tempo, posso pensare di trovare l'intervallo spaziale in un modo alternativo per ridurre gli errori commessi.
A partire dall'equazione generale del moto posso scrivere
Il procedimento si ripete andando via via avanti nel moto. Nel farlo, dobbiamo confrontare i risultati con il percorso che si suppone noto. Se un intervallo finisse per scavallare punti di rilievo (come cambio di pendenze, curve...) occorrerebbe ridurre gli intervalli in modo da ovviare a questo problema.
Metodo
Per ovviare al fatto che nel #Metodo $ Delta v$ occorra ricalibrare gli intervalli in modo da evitare le variazioni di condizioni che si verificano lungo il tracciato, posso pensare di risolvere l'equazione generale del moto a partire proprio dai
Comincio con il trovare l'accelerazione iniziale da:
È evidente che il metodo non è applicabile se parto con velocità iniziale nulla!!
otterrei infatti:
che non posso calcolare se
Metodo
Rappresentazione del moto del veicolo isolato
Curve caratteristiche dei motori
Le curve caratteristiche dei motori sono le curve che rappresentano l'andamento di
- Potenza
- Coppia
- Consumo specifico
in funzione della velocità di rotazione
La caratteristica meccanica del motore si lega alla caratteristica meccanica di trazione, attraverso i sistemi di trasmissione.
La velocità del veicolo è
essendo
- "
" wheel (=ruota)
Sono necessari il rapporto di trasmissione
La velocità assume quindi la seguente espressione
La potenza erogata dal motore è trasmessa alle ruote solo in parte, a seconda del rendimento della trasmissione,
dove
A questo punto, sostituendo
Caratteristica di trazione ideale
La caratteristica di trazione ideale è quella che consente il pieno sfruttamento della potenza erogata dal motore. Dovrebbe avere quindi l'andamento di un'iperbole equilatera in quanto, in questo caso, si avrebbe costante il prodotto
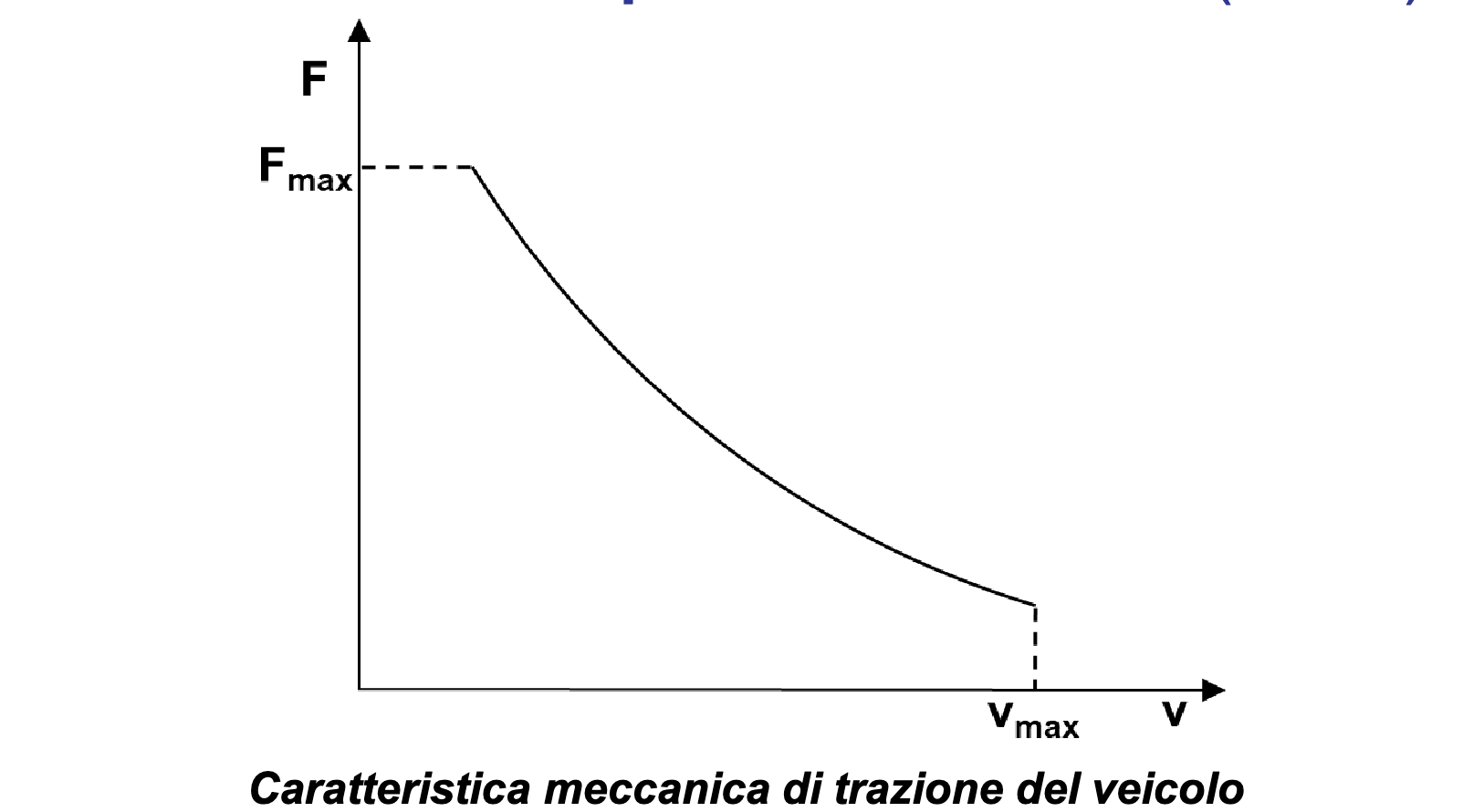
In realtà non esistono motori con questa caratteristica di trazione a potenza costante. Al più, il motore in CC si avvicina abbastanza a questa condizione.
Per ovviare a questo problema gli organi di regolazione cercano di approssimare per punti la caratteristica ideale generando una caratteristica artificiale variando con continuità le variabili di esercizio del motore.
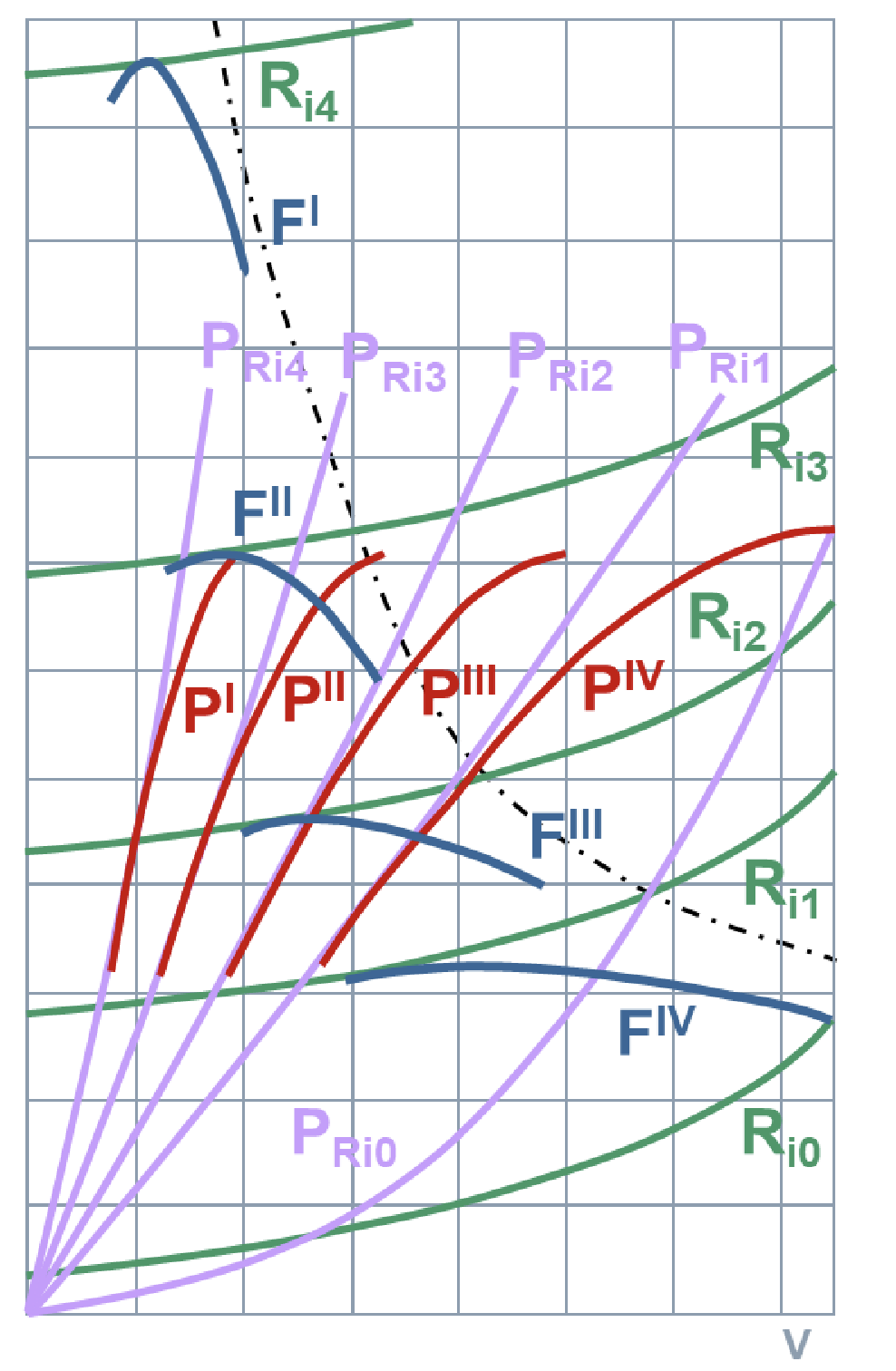
Caratteristica di trazione artificiale
Nei motori endotermici la #Caratteristica di trazione ideale è ottenuta mediante l'utilizzo del cambio di velocità, il quale consente di modificare il rapporto di riduzione tra il motore e le ruote.
In figura, è riportato l'andamento di una caratteristica di trazione per un veicolo con cambio a 4 marce:
Stabilità della caratteristica di trazione
I tratti decrescenti della caratteristica di coppia o di forza di trazione sono stabili.
Se c'è un aumento di velocità, alla fine della perturbazione il sistema torna alla precedente condizione di equilibrio autonomamente.