01 - Introduzione - VIT
01 - Introduzione - VIT
L'obiettivo di Veicoli e Impianti di Trasporto è di fornire le conoscenze teoriche di base relative sia all'architettura, la dinamica e la locomozione dei veicoli utilizzati nei sistemi di trasporto terrestri.
Per veicolo si intende qualunque contenitore mobile in grado di trasportare passeggeri o merci (funzione commerciale).
La mobilità è garantita da un sistema di locomozione completamente o parzialmente a bordo (veicolo automotore) ovvero dalla possibilità di essere trainato da veicoli automotori.
Non tratteremo i veicoli per lo svolgimento di lavori di altra natura (veicoli speciali)
Il veicolo è un sistema costituito da diversi sottosistemi:
- Sostentazione
- Guida - libera o vincolata
- Locomozione - che assicura la realizzazione del moto
- Controllo della marcia - manuale, automatico e vie di mezzo: semiautomazione
Si può avere:
- Trazione concentrata
- Trazione distribuita
- Risolve il problema dell'aderenza limitato tra ogni ruota e binario
Classificazione dei sistemi di trasporto
- #Classificazione per sostentazione
- #Classificazione per locomozione
- #Classificazione per guida
- #Classificazione per controllo di marcia
Classificazione per sostentazione
La sostentazione è la funzione che consente al veicolo di scambiare le forze con l'ambiente esterno.
È sostanzialmente di 3 tipi:
- #Sostentazione statica
- #Sostentazione dinamica
- #Levitazione magnetica
Sostentazione statica
Non è necessaria energia per garantire la sostentazione. Non è necessario moto relativo tra ambiente e veicolo.
Ad esempio veicoli terrestri, natanti, veicoli aerei a sostentazione aerostatica (dirigibile, mongolfiera...)
Sostentazione dinamica
La Sostentazione dinamica è quella realizzata attraverso un moto relativo tra veicolo e fluido ambiente con produzione di energia cinetica
- Spinta Idrodinamica: aliscafo
- Spinta aerodinamica
- Gettosostentazione
- Esoreattori: se prende parte il fluido ambiente
- Endoreattori: se non prende parte il fluido ambiente (razzo)
- Hovercraft: getti freddi opportunamente intubati
- 2 eliche:
- Una con asse orizzontale che serve alla propulsione
- Una con asse verticale che solleva il veicolo dal suolo
- 2 eliche:
Levitazione magnetica
Nella sostentazione magnetica la sostentazione è realizzata attraverso lo scambio di forze di natura elettromagnetica tra il veicolo e la pista.
Veicolo a levitazione magnetica: detti anche maglev.
La sapienza li studia nell'ambito del DITS: in un progetto europeo "Made 4 Rail"
vd. Nevomo.
Classificazione per locomozione
La locomozione è la funzione che realizza il moto vincendo le forze che a esse si oppongono (resistenze al moto).
Si utilizza un propulsore che utilizza l'energia meccanica trasmessa dal motore che a sua volta ottiene da energia termica o elettrica.
Si avranno:
- Ruote motrici: quelle locomotrici
- Ruote trainate
- Traino con fune (funivie, seggiovie, funicolari)
- Cremagliera (treni a cremagliera: vanno su salite molto ripide)
- Fra le due rotaie c'è una dentiera che ingrana con una ruota dentata montata sul treno
- Elica (natanti, aeromobili)
- Esoreattore (Aeromobili, missili)
- Endoreattore (razzi)
- Motore lineare (maglev)
Classificazione per guida
La guida è la funzione che consente al veicolo di seguire la traiettoria voluta.
Guida libera
La traiettoria è imposta dal conducente (es. automobile)
Ad esempio l'auto ha 2 gradi di libertà.
Guida vincolata
La traiettoria è imposta dall'infrastruttura (ferrovia).
Ha 1 solo grado di libertà
Classificazione per controllo di marcia
Controlla sia la locomozione che la guida.
Di 3 tipi:
Manuale
Unicamente affidato al conducente
Automatico
Conducente completamente assente
Semi-automatico
Treni: Sistemi di protezione:
- SCMT: Sistema Controllo Marcia Treno (sistema italiano)
- ERTMS/ETCS a diversi livelli: Integrato a livello europeo.
- Liv2: i segnali arrivano direttamente in cabina di guida
- Liv3: distanziamento dinamico non per sezioni di blocco ma basato su posizione, velocità del treno... (si basa sul segnalamento satellitare)
I sistemi di protezione e controllo dei treni devono essere certificati come SIL4. Deve esserci probabilità di guasto minore di
Impianti di trasporto
Gli Impianti di trasporto sono l'interfaccia fra il veicolo e le funzioni connesse con il suo uso
- Impianti per il trasbordo dei passeggeri: fermate (non c'è possibilità di precedenza), stazioni
- Impianti per trasbordo delle merci: stazioni, interporto (scambio fra gomma e ferro)
- Impianti per la composizione di treni e veicoli: smistamenti (strutture per fare la composizione dei treni merci: (video)
- Impianti per la sosta
- Impianti per la manutenzione: depositi, officine
- Impianti di manovra e trasbordo di veicoli da una modalità di trasporto all'altra e gli annessi veicoli necessari per l'effettuazione delle manovre
- Impianti per la fornitura dell'energia necessaria per la locomozione
- Impianti di controllo della marcia del singolo veicolo
- Impianti di controllo della marcia di flotte di veicoli e quindi del deflusso veicolare
La ruota
Che la guida sia #Guida libera o #Guida vincolata, l'elemento essenziale a trasmettere gli sforzi di #sostentazione, #Classificazione per guida e locomozione è la ruota.
Cinematica della ruota indeformabile
In prima approssimazione si considera la ruota come un cerchio rigido di diametro
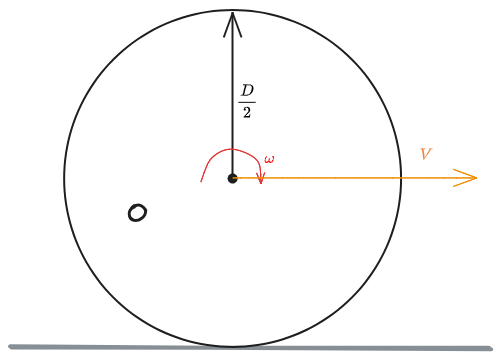
Rotazione intorno al centro
3 casi possibili:
- #Puro rotolamento
- #Strisciamento retrogrado
- #Strisciamento diretto
Puro rotolamento
Ciascun punto
Il moto di ogni punto è quindi costituito da due moti:
- Rotazione intorno ad O con velocità risultante
- Traslazione rispetto alla via a velocità
In definitiva ogni punto rispetto al suolo ha istantaneamente come velocità:
che risulta nel diagramma triangolare a destra.
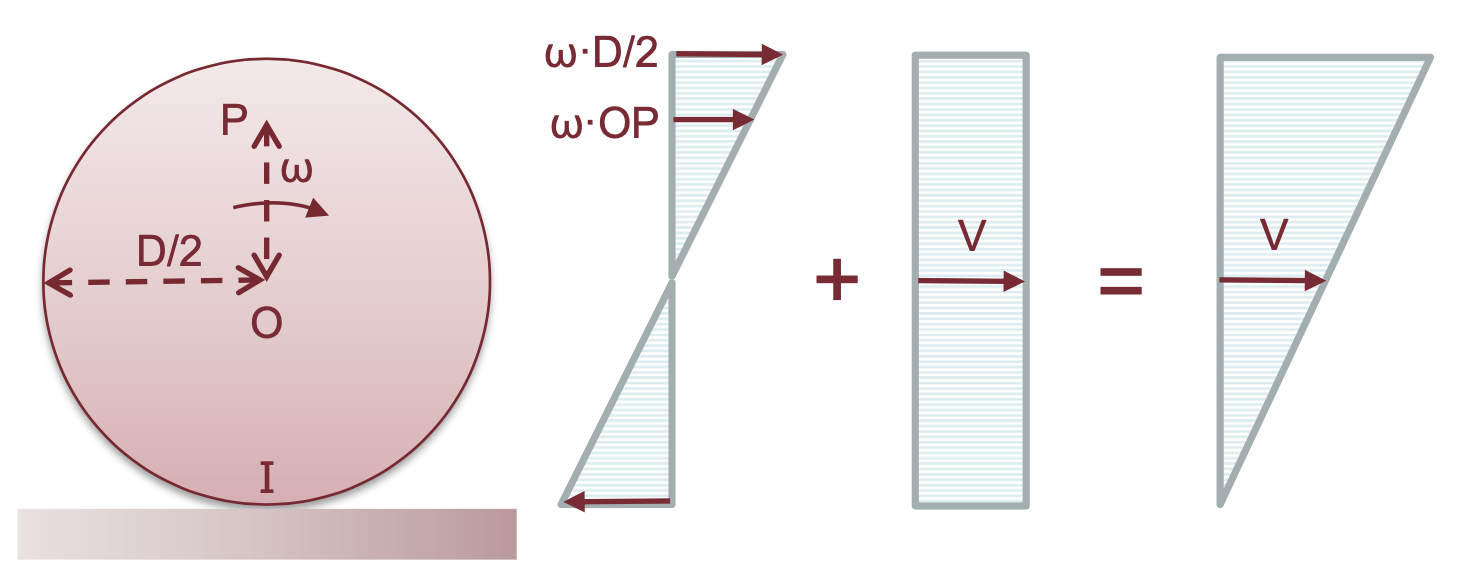
Strisciamento retrogrado
È il caso in cui
In questo caso il punto I a velocità nulla risulta interno al cerchio.
Il punto di contatto invece risulta avere istantaneamente velocità contraria al moto (rispetto alla via) e pari a
La ruota rotola più che avanzare
(slittamento)
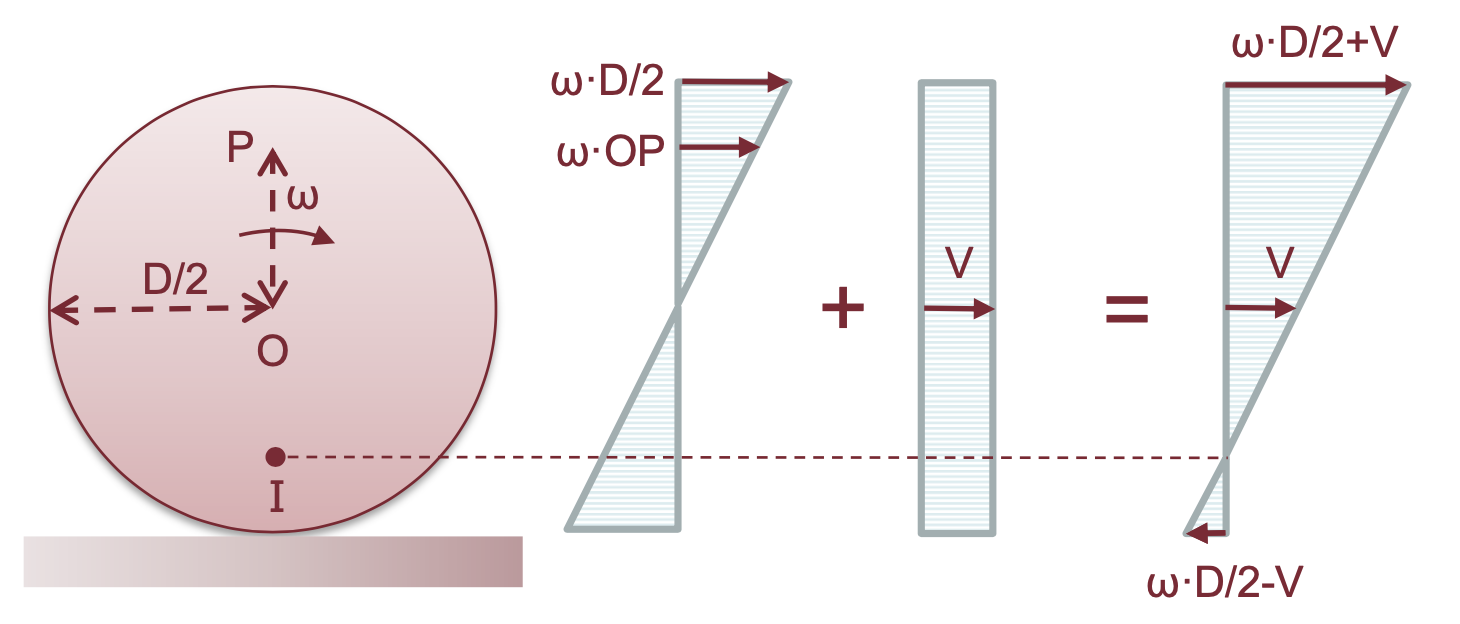
Strisciamento diretto
In questo caso
Il centro di istantanea rotazione I è esterno al cerchio.
Il punto di contatto striscia rispetto alla via con velocità diretta come quella del moto della ruota e a velocità
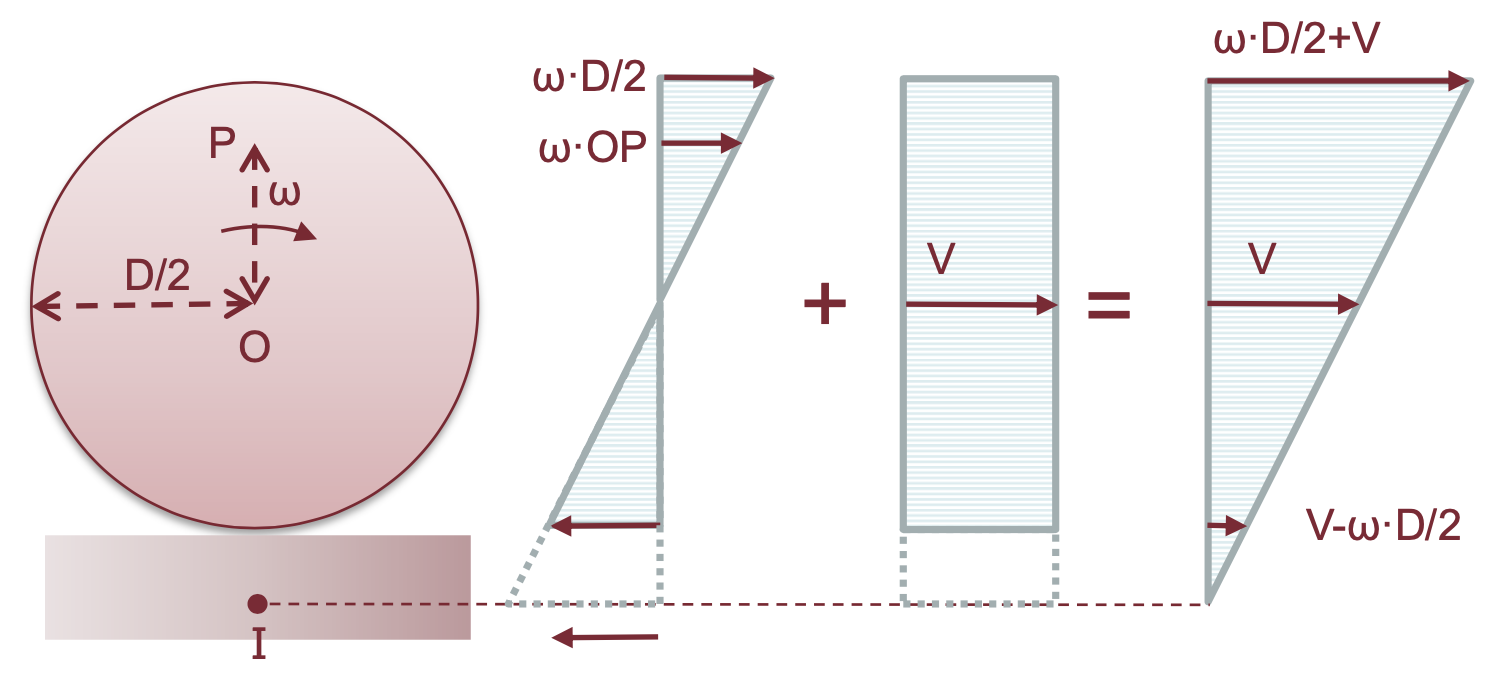
il punto di contatto tra la ruota e il terreno ha una velocità relativa rispetto all'asfalto o al terreno positiva.
(pattinamento)
Scorrimento
Quantifica la ripartizione tra il moto di #Puro rotolamento e lo strisciamento
: assenza di strisciamento (#Puro rotolamento) : arrivando al valore massimo di 1 quando (ruota che rotola su se stessa senza anvanzare e quindi : #Strisciamento retrogrado o slittamento) : arrivando al limite a quando e quindi : la ruota striscia senza rotolare (#Strisciamento diretto)
Nell'ultimo caso, per evitare di avere valori negativi di
Lo scorrimento può essere anche espresso in termini percentuali:
Statica e dinamica della ruota deformabile elasticamente
Nella realtà, ruota e via sono costituiti da materiali deformabili in presenza di carichi esterni.
Sia ruota che via lavorano in campo elastico.
Per semplificare la modellazione del fenomeno, si può considerare la ruota deformabile poggiata su una superficie (la via) indeformabile. Il campo di pressione che ne risulta è mostrato nella figura sottostante. La pressione è proporzionale all'accorciamento di ciascuna fibra. Si avrà pertanto pressione massima al centro della sezione (segmento nel piano) AC. L'andamento è di tipo parabolico.
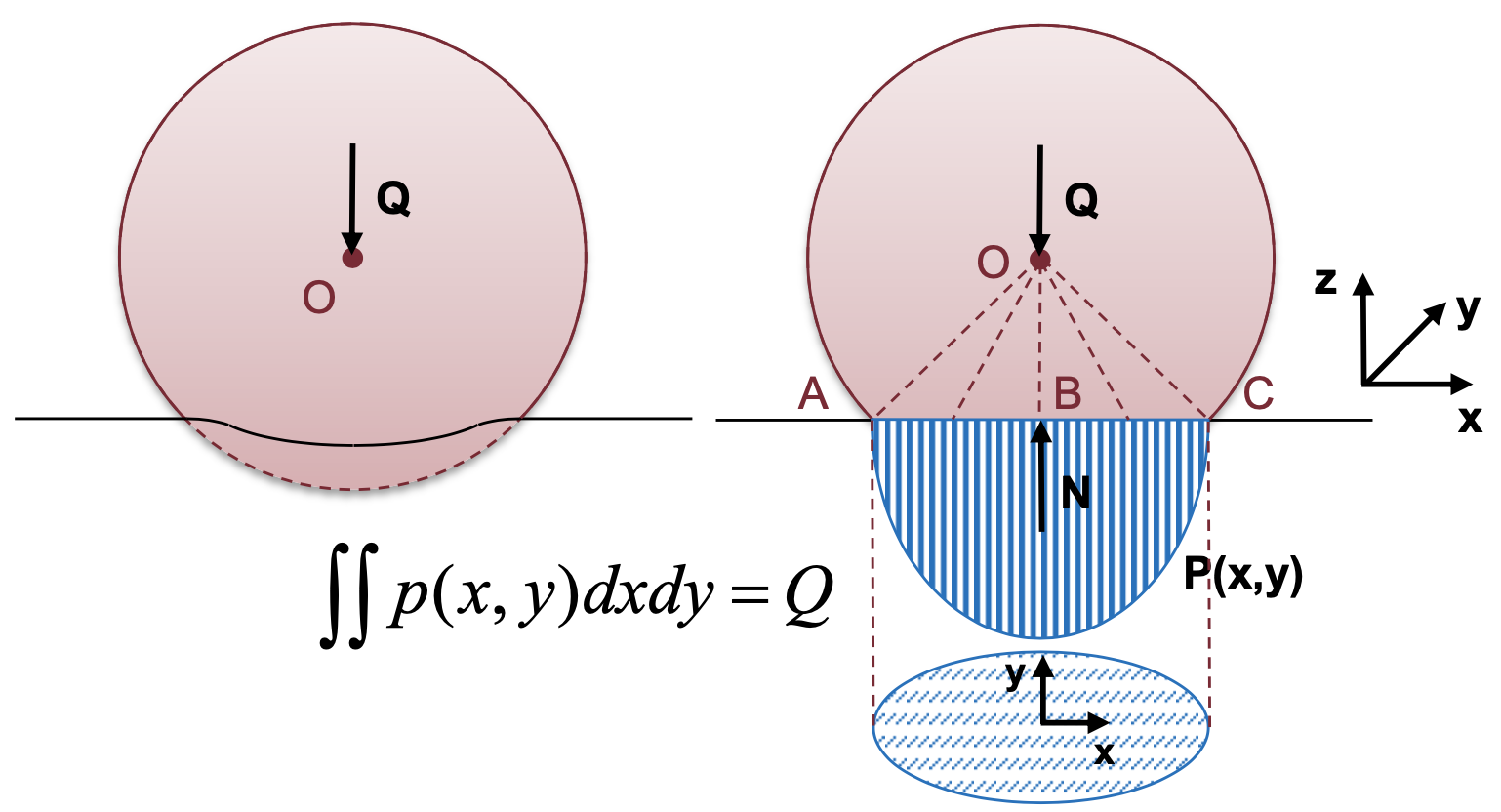
Il totale della forza sarà dato da l'integrale doppio della superficie di contatto ruota-via
Per via della deformabilità, tra ruota e via si generano due tipi di resistenze:
Attrito volvente
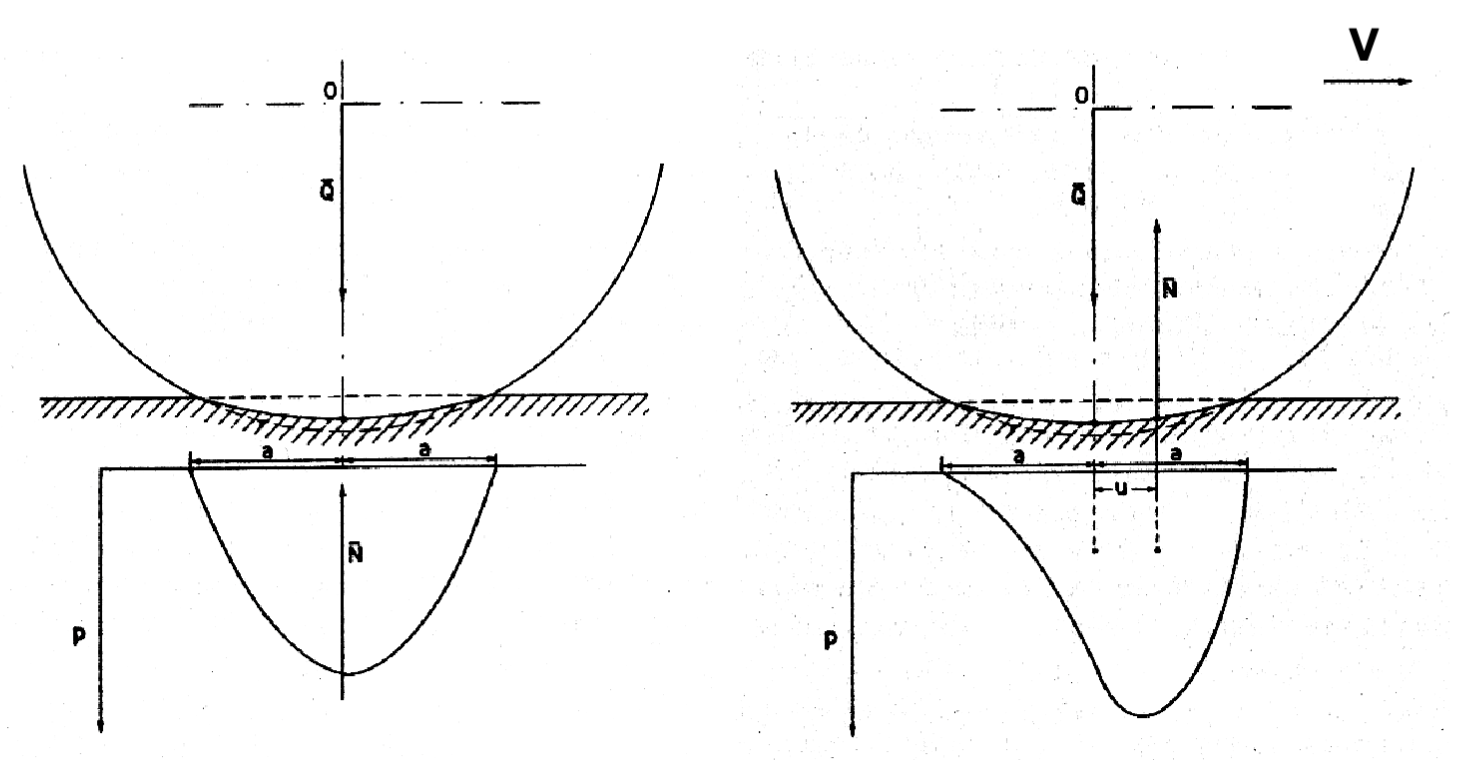
Per mettere in moto la ruota occorrerà applicare un momento tale da scavallare il bordo della superficie di contatto (A o C). Questo fa sì che il campo delle pressioni si modifichi concentrandosi verso la direzione del moto e facendo sì che la reazione
Tale momento si può applicare in due modi:
- Applicando un momento torcente all'asse della ruota,
- Oppure applicando al mozzo della ruota una forza
attraverso la boccola tale che sia essendo il raggio nominale di rotolamento della ruota
si deve in definitiva avere una forza di trazione
dove il termine costante
Aderenza
Se due corpi, A e B sono fermi tra loro, in assenza di slittamenti macroscopici, si può applicare una forza tangente alla superficie di contatto
La massima forza che si può applicare è
e
Aderenza sulla ruota portante trainata
Si prenda in considerazione in un veicolo la ruota portante trainata. Su questa agisce una forza di traino
Il fatto che i punti di contatto ruota-via rimangano fermi tra loro significa che, nel punto
Tale forza di attrito può crescere fino al valore massimo
La generica fibra si inflette per consentire lo spostamento relativo che l'attrito di primo distacco impedisce tale inflessione provoca una forza tangenziale elastica
Finché tale condizione è rispettata, si ha solo deformazione elastica senza scorrimento.
Quando invece si verifica
la condizione di #Aderenza non è più rispettata e il punto di contatto striscia. Pertanto ci sarà attrito pari a
essendo
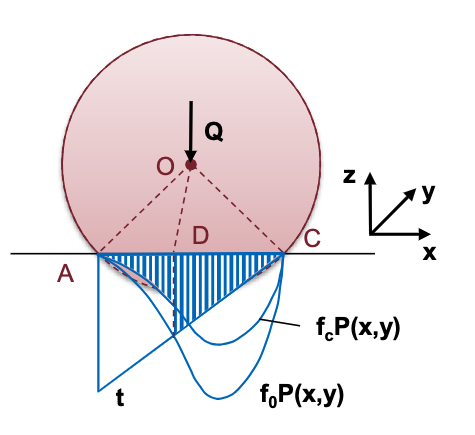
Nella generica sezione longitudinale
- una zona
in attrito statico - la cresce linearmente in presenza di sola deformazione elastica - una zona
in attrito cinetico - la decresce fino al valore limite disponibile pari a .
Si avrà quindi che, la forza totale tangenziale al contatto ruota-via presenta due contributi:
- Uno generato dalla crescita lineare della forza di taglio nel tratto
- - Uno d. to dall'attrito cinetico nella zona di uscita nel tratto
-
La forzatrasmessa al contatto ruota-via è
Essendo il carico totale dovuto alla distribuzione di pressione pari a
In assenza di scorrimento, la massima forza tangenziale che può essere trasmessa è
Se invece tutte le fibre fossero in scorrimento si avrebbe come forza tangenziale
Nel caso in cui siano presenti sia la zona in aderenza che quella in strisciamento, la forza tangenziale
e quindi dividendo per
dove
La relazione si può anche scrivere, esplicitando le forze:
Quindi, il coefficiente di aderenza
Equilibrio della ruota portante e trainata
Guardiamo adesso all'equilibrio delle forze e dei momenti sulla ruota portante e trainata.
Affinché la ruota rotoli, occorre vincere l'attrito a rotolamento (#Attrito volvente) ma anche che la forza di contatto sia inferiore a
Qualora questa condizione non fosse verificata, la ruota verrebbe trascinata con uno #Scorrimento crescente.
Pertanto al limite la ruota viene trascinata senza rotolare (pattinamento). Si avrebbe quindi raggio effettivo di rotolamento tendente all'infinito e la velocità angolare di rotazione tenderebbe ad annullarsi.
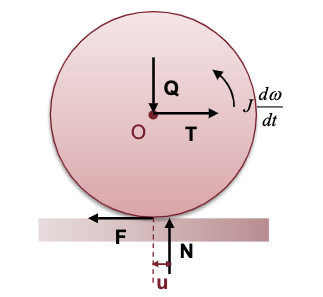
Equilibrio della ruota motrice
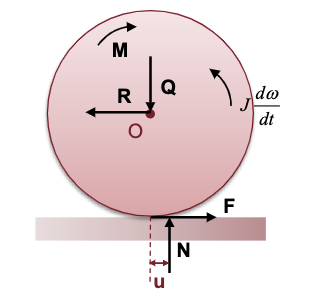
Nel caso di una ruota motrice, al posto di una forza di trazione si ha una coppia motrice
Anche in questo caso vogliamo sia verificata la condizione di aderenza, la quale limita la coppia motrice che può essere applicata.
per cui
Qualora questa condizione non venisse verificata, la ruota accelererà angolarmente (aumenta
Equilibrio della ruota frenata
❗❗❗❗❗❗❗❗❗❗❗❗❗
❗❗❗ COMPLETARE ❗❗❗
❗❗❗❗❗❗❗❗❗❗❗❗❗
Attrito radente
Sono dati due corpi in contatto tra loro in un punto
dove
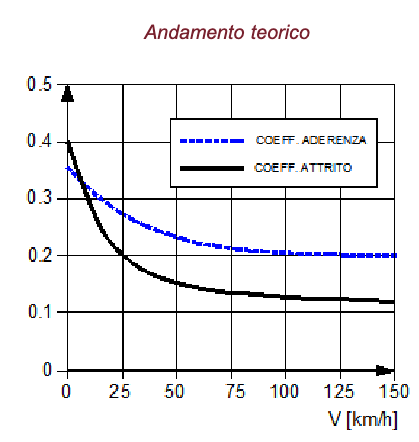
Coefficienti di aderenza e attrito in funzione alla velocità
In ferrovia, il #Coefficiente di aderenza presenta, a velocità nulla, valori pari a
Tale valore decresce al crescere della velocità.
L'andamento del coefficiente di aderenza in funzione della velocità è descritto dalla #Legge di Müller
Legge di Müller
Area di contatto ruota-rotaia
La superficie di contatto tra ruota ferroviaria e rotaia è relativamente limitata. È infatti nell'ordine dei