04. Diagramma Elementare del Moto e Prestazioni del Veicolo Isolato
Altri libri di riferimento:
- Ingegneria dei sistemi ferroviari - tecnologie metodi ed applicazioni, egaf
- Orlandi Alessandro, Meccanica dei trasporti, ???
- Leuzzi V., Fondamenti di trasporti - Appunti delle lezioni, facoltà di ingegneria di Roma
- Scarponi P., Malavasi G., Fondamenti di trasporti - Applicazioni, Facoltà di Ingegneria di Roma
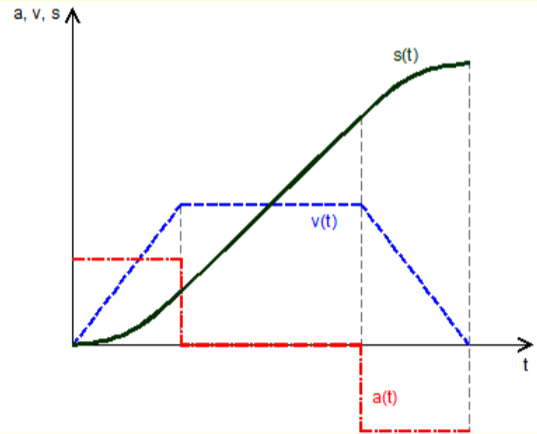
Diagramma Elementare del Moto
Forze sul veicolo in movimento
- [Forze motrici]
- [Forze Frenanti]
- Resistenze ordinarie
- Resistenze addizionali
Fasi di sosta
Si hanno quando
Fasi di movimento
Si hanno quando
Possono quindi verificarsi 4 casi:
L'obiettivo è quello di risolvere l'equazione generale del moto:
dove:
Velocità e Accelerazione Sforzo di trazione Resistenze ordinarie (rotolamento e aerodinamica) Resistenze addizionali (livelletta e curva) Massa equivalente (che tiene conto di tutte le inerzie) Coefficiente di maggiorazione delle masse rotanti
- Perché dalla slide 92 non c'è più
ma poi ricompare nella 96?? - Formule prese da fonti diverse con diverse approx. Dovrebbe esserci semrpe.
- Nella slide 96, la trazione e la resistenza sono calcolate in
? Se no, come posso levarle dall'integrale????????? - Esatto
Soluzione dell'equazione generale del moto
Per conoscere il moto di un veicolo dobbiamo risolvere l'equazione generale del moto. Per farlo la riscriviamo nella forma:
che si può risolvere per separazione di variabili:
Questa andrebbe quindi integrata analiticamente restituendoci la funzione
In realtà è di nostro interesse conoscere la funzione
possiamo riscrivere
Poiché però le resistenze e la trazione dipendono dalla velocità e di solito non conosciamo analiticamente questa dipendenza, dovremo fare uso di alcuni metodi numerici per risolvere l'equazione non analiticamente ma sfruttando metodi di risoluzione alle differenze finite.
Potremmo principalmente adoperare 3 metodi distinti:
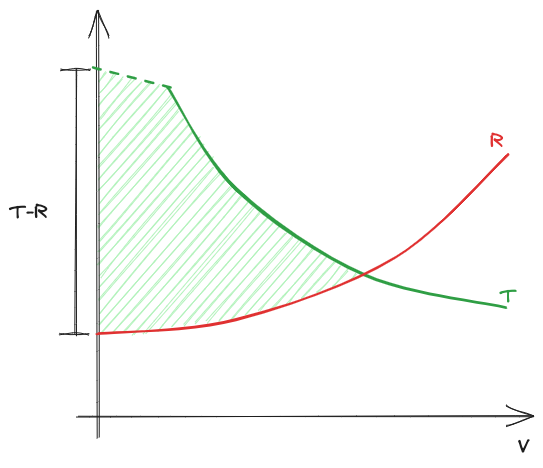
È infatti noto il diagramma
Metodo
Consiste nel partire da intervalli finiti di velocità.
Si scelgono
Si hanno quindi le seguenti grandezze:
Possiamo quindi ricavare il valore medio dell'accelerazione nell'intervallo
Una volta ricavata la
dove il fattore
Si ricava quindi anche lo spazio percorso nell'intervallo di tempo considerato:
Facendo questa operazione si sta considerando la velocità costante e pari a
Siccome ho già supposto che l'accelerazione sia costante quando ho calcolato l'intervallo di tempo, posso pensare di trovare l'intervallo spaziale in un modo alternativo per ridurre gli errori commessi.
A partire dall'equazione generale del moto posso scrivere
Il procedimento si ripete andando via via avanti nel moto. Nel farlo, dobbiamo confrontare i risultati con il percorso che si suppone noto. Se un intervallo finisse per scavallare punti di rilievo (come cambio di pendenze, curve...) occorrerebbe ridurre gli intervalli in modo da ovviare a questo problema.
Metodo
Per ovviare al fatto che nel #Metodo $ Delta v$ occorra ricalibrare gli intervalli in modo da evitare le variazioni di condizioni che si verificano lungo il tracciato, posso pensare di risolvere l'equazione generale del moto a partire proprio dai
Comincio con il trovare l'accelerazione iniziale da:
È evidente che il metodo non è applicabile se parto con velocità iniziale nulla!!
otterrei infatti:
che non posso calcolare se
Metodo
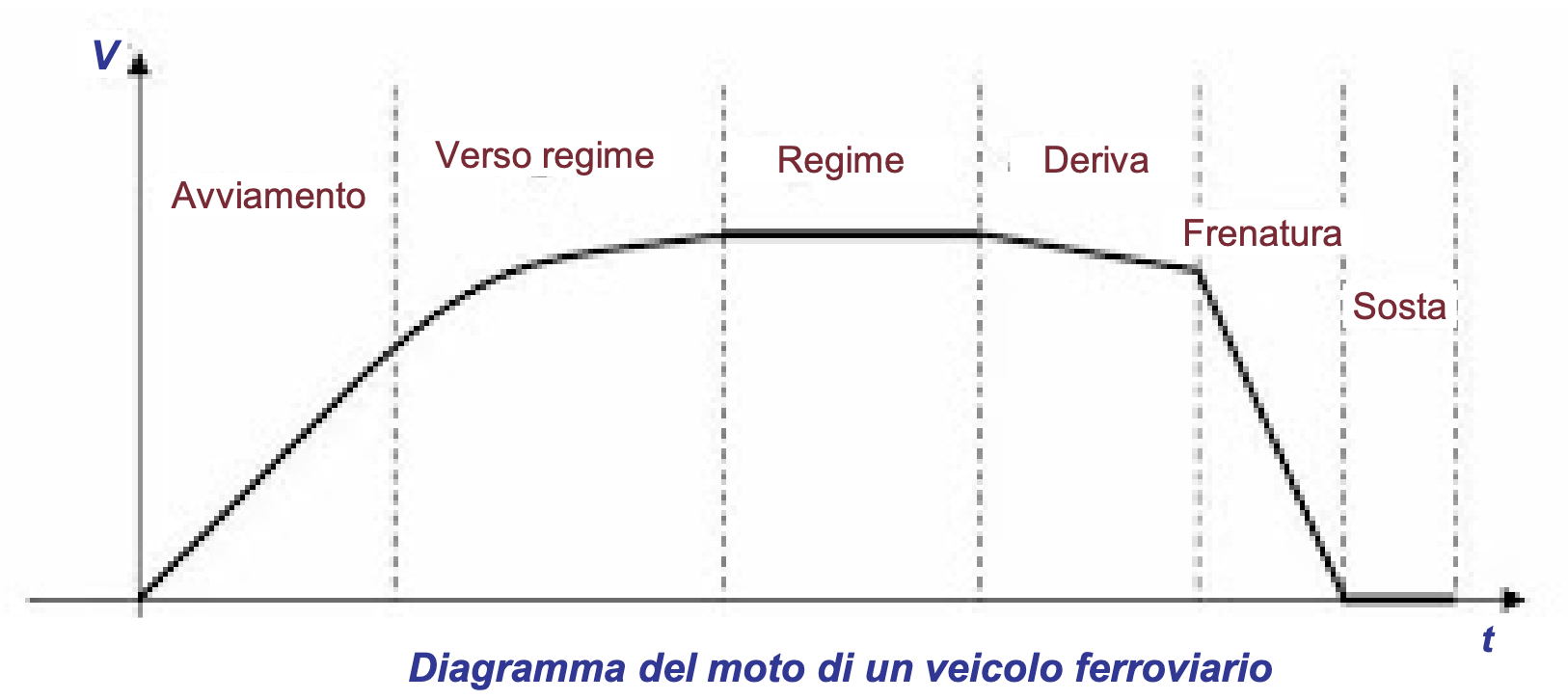
Rappresentazione del moto del veicolo isolato