03. Sostentazione e locomozione
3. Sostentazione e Locomozione
La sostentazione è una delle quattro funzioni principali a cui devono assolvere i veicoli di trasporto
La funzione che permette al veicolo di rimanere sospeso sul mezzo che percorre.
Sostentazione
La sostentazione è la funzione che consente al veicolo di scambiare le forze con l'ambiente esterno.
Un veicolo deve poter restare fermo quando è soggetto solo al suo peso.
Una prima classificazione dei modi di trasporto si può effettuare sulla base della #Sostentazione:
- #Sostentazione terrestre
- #Sostentazione a vie d'acqua
- #Sostentazione aerea
Sostentazione terrestre
Che viaggia su terra.
Sfrutta la reazione del terreno.
Vale per
- Veicoli terrestri
- Aeromobili prima del decollo e dopo l'atterraggio
A sua volta si può essere:
- #Sostentazione a guida libera
- #Sostentazione a guida vincolata
Sostentazione a guida libera
Il #veicolo è libero di scegliere la propria traiettoria.
Sostentazione a guida vincolata
Il #veicolo è costretto nella sua traiettoria da una qualche guida.
Ne sono esempio le ferrovie, le funivie...
Sostentazione a vie d'acqua
A sua volta si divide in:
- #Sostentazione idrostatica
- #Sostentazione idrodinamica
Sostentazione idrostatica
Sfrutta il Principio di Archimede
Sostentazione idrodinamica
- Spinta per reazione di aria fredda con acqua o terreno (Hovercraft)
Sostentazione aerea
A sua volta si divide in:
- #Sostentazione aerostatica
- #Sostentazione aerodinamica
Sostentazione aerostatica
- Dirigibile
- Mongolfiera
Sostentazione aerodinamica
- Spinta con reazioni di aria calda o gas combusti
- Con fluido ambiente (Esoreattori aeronautici: turbogetti, missili)
- Senza fluido ambiente (Endoreattori: razzi)
Locomozione
Propulsione
Organo legato con un motore (che fornisce energia) fa si che si generi di movimento
Trazione
La propulsione per i veicoli terrestri
Sistemi di propulsione
Può essere:
Aderenza
- Naturale: l'attrito che c'è naturalmente tra materiali
- Artificiale: Per mezzo di ruote dentate, cremagliere, o altri dispositivi...
Tra due corpi non in scorrimento tra loro.
C'è un coefficiente di aderenza tra la ruota e la strada/ferrovia.
Traino con la fune
<--#Aderenza
- Funicolari. Veicoli con ruote tirati con la fune
- Seggiovie e funivie
Cremagliera
<--#Aderenza
Ruota motrice
<--#Aderenza
Ruota trainata
<--#Aderenza
Reazione
<--#Aderenza
- Variazione della quantità di moto
- Indiretta: del fluido ambiente (motore+elica)
- Pura: della massa del sistema propulsore (razzo)
- Diretta: di entrambi (reattore con un unico complesso motore propulsione)
Elica
<--#Aderenza
- Natanti
- Aeromobili
Esoreattore
<--#Aderenza
- Aeromobili
- Missili
- ...
Endoreattore
<--#Aderenza
- Razzi
Equazione generale del moto
La #Locomozione richiede che un motore fornisca energia per la traslazione
La forza di trazione
Forza di trazione, altrimenti definita come risultante delle forze attive Somma delle resistenze al moto Massa del veicolo che subisce l'azione delle forze attive e passive Coefficiente di maggiorazione delle masse rotanti per tenere conto della necessità di accelerare masse rotanti e traslanti lungo traiettorie diverse da quelle del veicolo
Corrisponde all'equazione della dinamica di newton:
A rigore, per un solido nel piano, dovremmo avere 3 equazioni: 3 gradi di libertà
Quindi usiamo il coefficiente
- Locomotive elettriche:
- Elettromotrici:
- Veicolo rimorchiato:
Caratteristica meccanica di trazione
La funzione
Tornando all'equazione generale del moto:
Immaginiamo di saperla risolvere, dobbiamo trovare la forza necessaria a muovere il veicolo e trovare la caratteristica ???.
La caratteristica meccanica del veicolo è
Ha come equazione:
da cui
La potenza del motore invece:
Dove
rendimento:
Può essere anche
Il motore può anche lavorare a potenza costante. Che è il caso ideale.
La Caratteristica meccanica del veicolo ideale permette di lavorare a potenza costante e alla potenza massima del motore per cui è stato progettato quel motore.
Si può ricavare a partire dalla caratteristica meccanica dei motori a bordo.
Il motore può erogare una certa coppia (
Per farlo dobbiamo conoscere il rapporto di trasmissione.
Nei veicolo stradali cambia cambiando la marcia.
Otteniamo quindi tante curve di
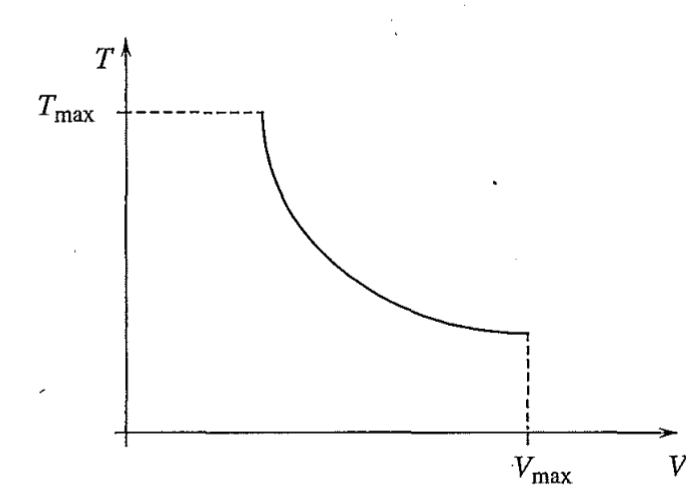
La caratteristica di trazione ideale è un'iperbole equilatera.
È limitata.
Per l'iperbole, se la trazione andasse a 0, la velocità andrebbe a infinito e viceversa.
- La forza massima di trazione a basse velocità è data dal limite di aderenza oppure dai limiti di confort
- Ad alta velocità, il limite è imposto dalle prestazioni del mezzo di trazione (velocità massima di rotazione del collettore nei motori a corrente continua) o delle condizioni di sicurezza (caratteristiche del binario e del tracciato plano-altimetrico o del sistema di segnalamento per il trasporto ferroviario)
La caratteristica di trazione ideale è anche stabile. Non è detto il viceversa.
Le resistenze le possiamo quasi sempre schematizzare con un andamento parabolico.
La resistenza al moto non va mai a 0, neanche a velocità nulla. C'è sempre la forza di primo distacco.
Resistenze al moto
Ci sono:
Fattori causali
I fattori che causano #Resistenze al moto sono:
- Natura del mezzo ambiente
- Modalità di sostentazione e locomozione
- Caratteristiche del moto (traiettoria, velocità, accelerazione)
- Massa del veicolo
Resistenze specifiche
Nel mondo dei trasporti si tende a considerare le resistenze per unità di peso:
Resistenza specifica ( con chilogrammo e tonnellata peso) - Resistenza totale
Resistenze ordinarie e addizionali
Si ha che le resistenze possono essere:
- #Resistenze ordinarie
- #Resistenze Addizionali
Resistenze ordinarie
Le resistenze ordinarie sono quelle presenti a prescindere dalle condizioni di moto.
Le registriamo nel:
- Moto piano
- Moto Rettilineo
- Moto uniforme
Le fonti di #Resistenze al moto ordinarie sono principalmente:
- Ruota - Terreno per i veicoli stradali
- Assi - Telaio per i veicoli ferroviari
La superficie di contatto tra ruota e terreno/rotaia è:
- Ruota Auto:
- Ruota Treno:
Tra le resistenze ordinarie, troviamo:
- #Resistenza al rotolamento
- #Rotolamento perno-cuscinetto
- #Resistenza aerodinamica
Resistenza al rotolamento
Immaginiamo di avere una ruota ferma. Questa, per via del carico che porta (peso) si deformerà in corrispondenza della superficie di contatto. Il peso sarà quindi distribuito su una certa superficie secondo un campo di pressioni che si dimostra essere parabolico.
Immaginiamo ora che la ruota si muova a velocità costante verso destra, mossa da una forza trainante
Andando a scrivere le equazioni cardinali per il sistema sopra, usando come polo dei momenti il centro di rotazione, avremo:
Dalla legge dell'attrito abbiamo che
e quindi
con
In definitiva possiamo esprimere il coefficiente di attrito come:
Nei veicoli ferroviari si ha solitamente
Ne viene che il coefficiente di attrito di rotolamento sarà pari a:
che corrisponde quindi a una salita con pendenza dell'
Rotolamento ruota-strada
Nel campo stradale, la #Resistenza al rotolamento dipende da
- Pressione di gonfiaggio
- Flessibilità della carcassa
- Attrito generato nell'area di impronta
- Attrito viscoso tra pneumatico e filetti fluidi dell'aria
La determinazione delle resistenze è effettuata per via sperimentale:
- In laboratorio (su tamburo)
- Su strada
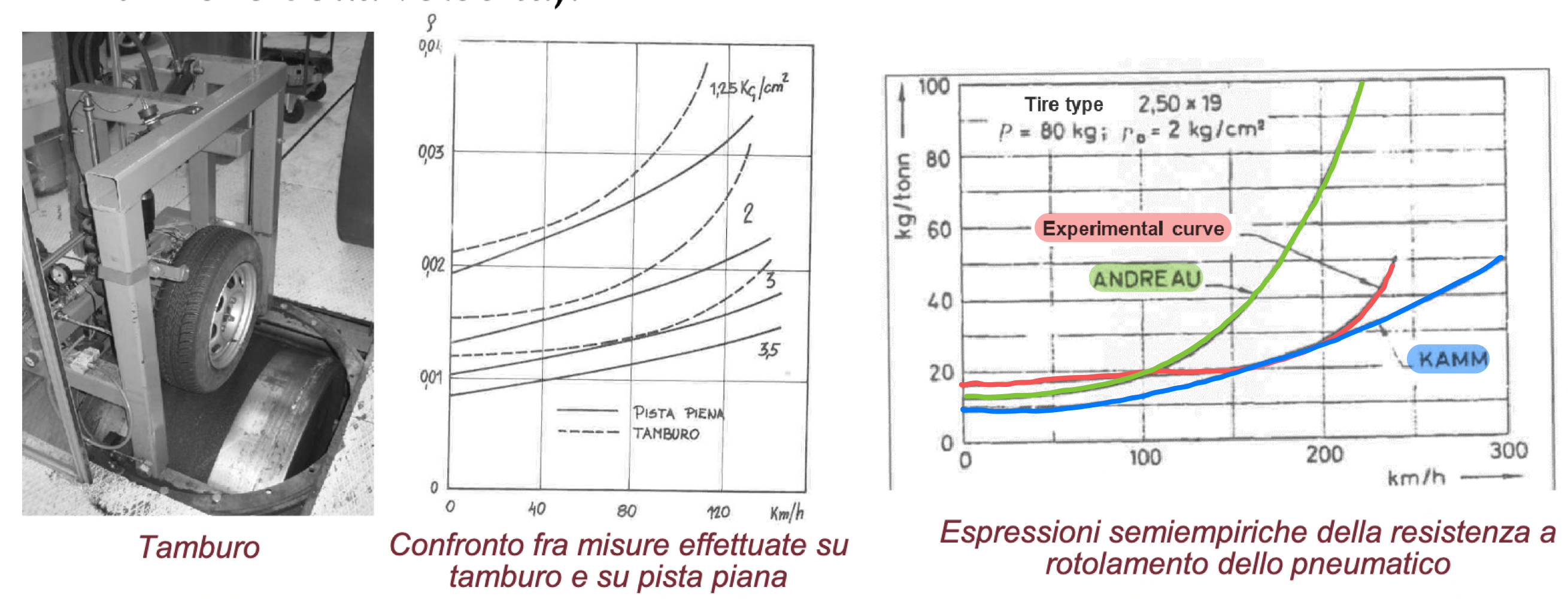
Come si vede nel grafico a dx, modelli diversi forniscono andamenti diversi delle resistenze in funzione della velocità. In rosso si vede il risultato sperimentale.
Rotolamento perno-cuscinetto
Ci sono 2 tipi di cuscinetti
- #Cuscinetto a Strisciamento
- #Cuscinetto a rotolamento
Cuscinetto a Strisciamento
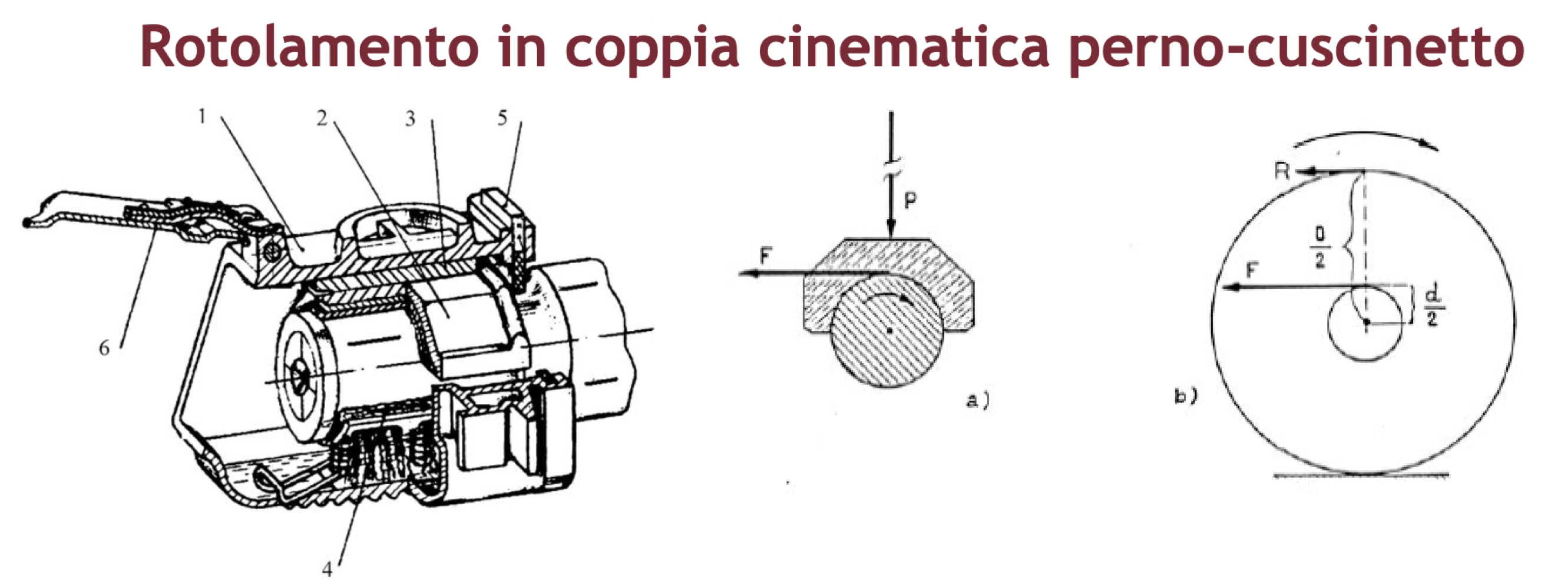
Una volta veniva chiamato bronzina (perché realizzato in una lega a base di bronzo).
Le due parti sono in contatto tra loro e lo scorrimento è assicurato da un'opportuna lubrificazione.
La forza di trazione deve vincere la coppia resistente provocata dall'attrito tra le parti del cuscinetto
Cuscinetto a rotolamento
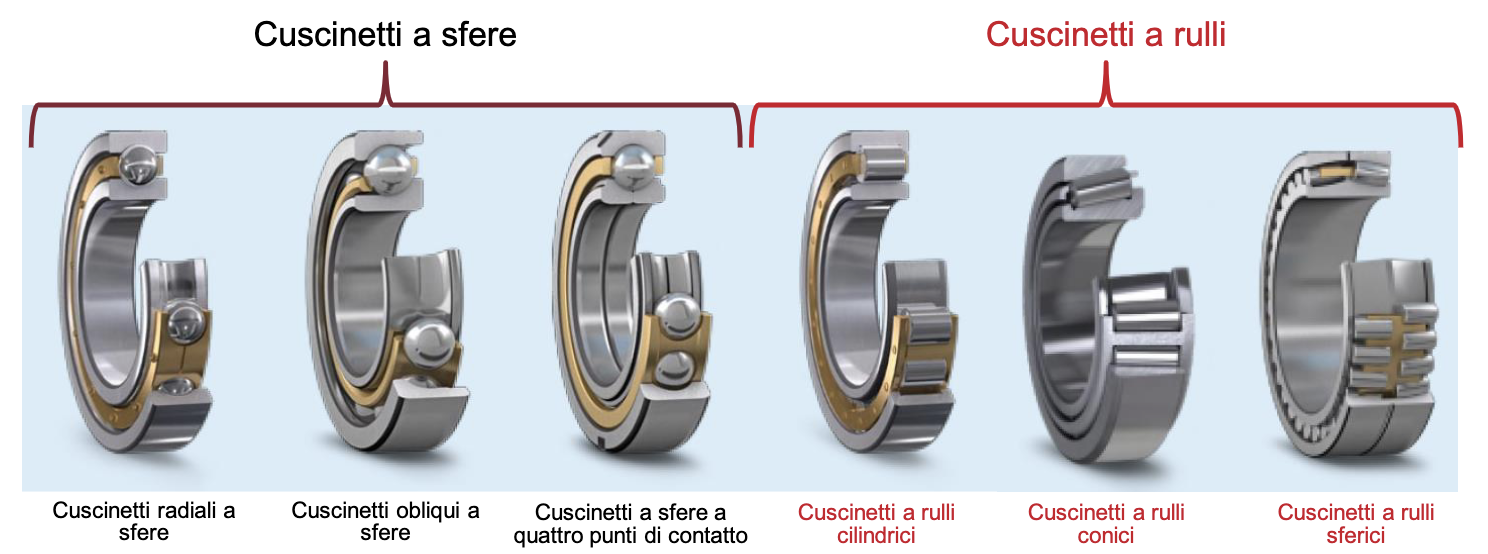
Il contatto è rotolante invece che strisciante. Il rotolamento può essere assicurato da:
- Sfere
- Rulli
- cilindrici
- Conici
- Sferici
La resistenza è leggermente crescente con la velocità
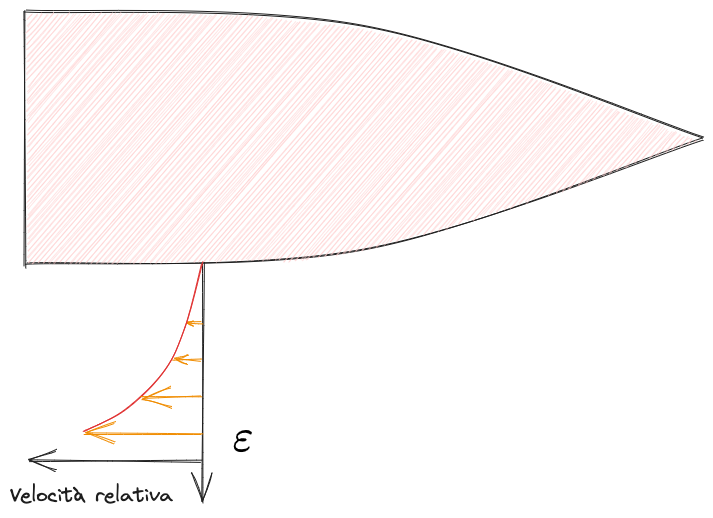
Resistenza aerodinamica
È generata da
- Attrito
- Salto di pressioni
...tra veicolo e "tubo" d'aria che lo investe.
L'unico modo che abbiamo per eliminare del tutto la resistenza aerodinamica è quella di porre il veicolo in un tunnel sottovuoto.
Immaginiamo di avere una portata costante d'aria:
dove:
Densità dell'aria Superficie Velocità dell'aria
Dovendo
Nel caso ideale, quando un flusso attraversa un veicolo, arriva con velocità
In realtà però interviene anche il Principio di Bernoulli, per cui l'energia totale dell'aria:
dove
Se
Nella realtà l'energia viene dissipata. Quindi all'uscita si ha che
Si ha quindi una resistenza che si oppone al moto del veicolo. In corrispondenza del punto di uscita si genera un moto turbolento che fa si che ci sia un calo di pressione: ne corrisponde un elevato Numero di Reynolds, il che significa grande resistenza al moto.
La resistenza sarà data da:
dove:
Coefficiente di resistenza aerodinamica Densità dell'aria Sezione Velocità del fluido
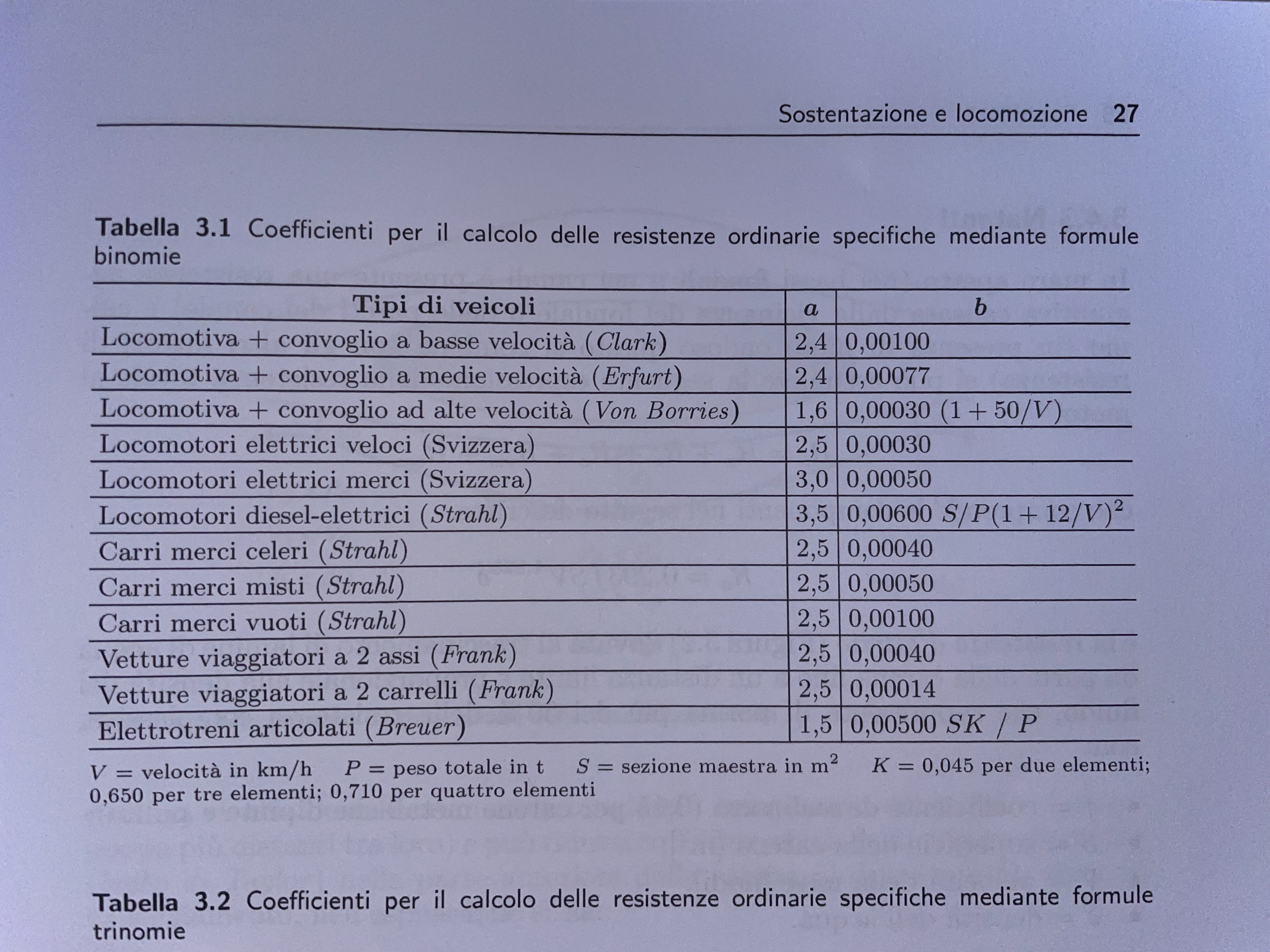
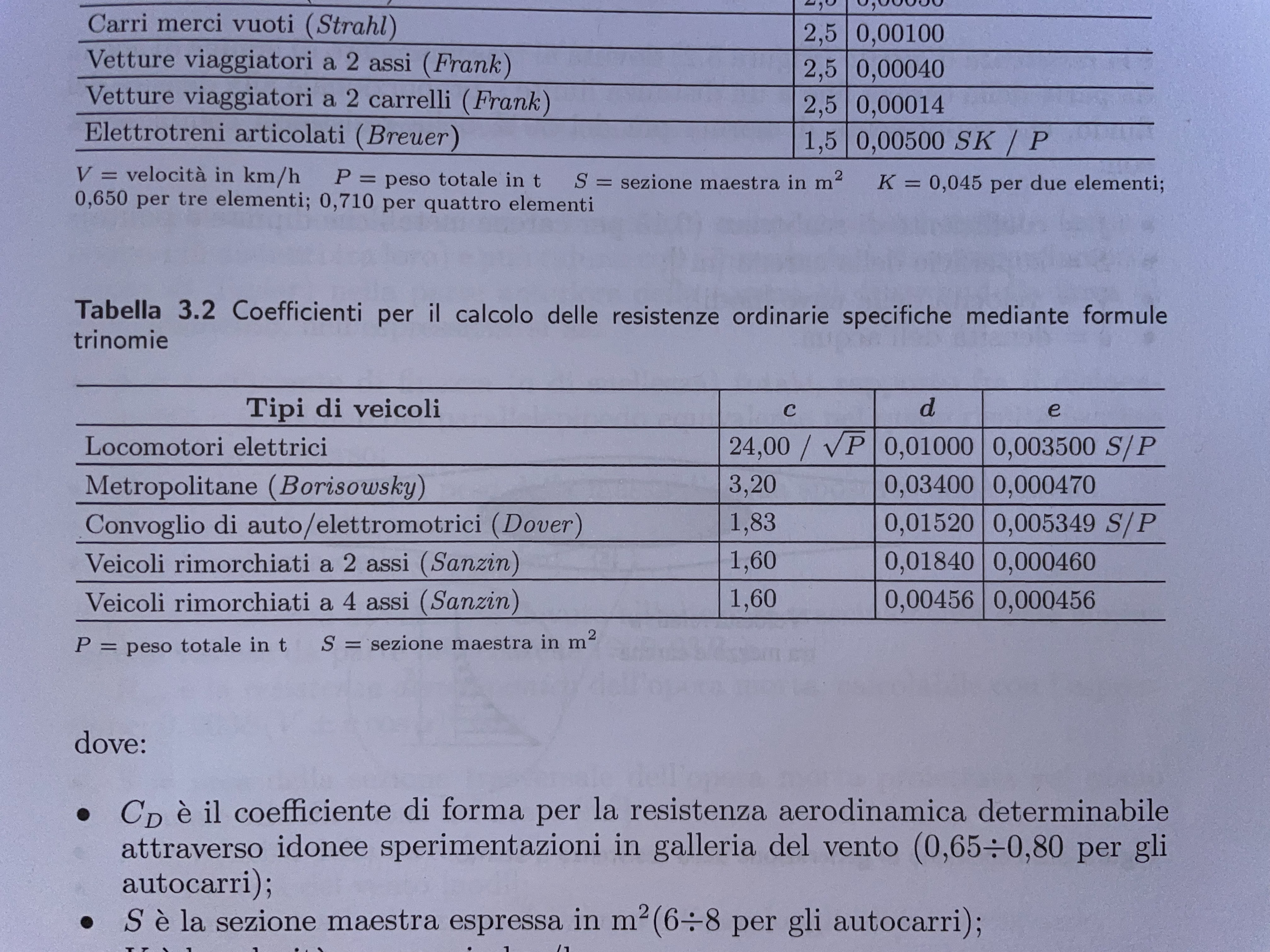
Formule binomie e trinomie
Visto i numerosi fattori che intervengono nel calcolo della resistenza, si segue un approccio sperimentale.
Sperimentalmente si trovano delle formule, dette formule binomie e formule trinomie che quantificano la resistenza totale che agisce su un veicolo.
dove
Resistenza specifica Velocità del veicolo in coefficienti determinati sperimentalmente per vari tipi di veicolo
La differenza tra formula binomia o trinomia sta nei tipi di resistenze che intervengono.
La resistenza al rotolamento dipende dalla velocità. A basse velocità la posso trascurare e uso quindi la formula binomia. A velocità più elevate sono costretto a tenerne conto e applico le formule trinomie.
Resistenze Addizionali
- Altre condizioni
- Moto accelerato
- Curva
- Salita
- Galleria
- ...
Resistenza dovuta alla livelletta (pendenza)
Quando un veicolo cerca di risalire un pendio si ottiene una resistenza al moto addizionale
dove
Resistenze specifiche per tipo di veicolo
Resistenze al moto per Natanti
Il compendio generale delle resistenze per natanti ci dà la seguente formula:
dove:
#Resistenza di attrito tra opera viva e acqua (la parte sommersa) Resistenza dovuta ai Vortici che si formano per depressioni a poppa Resistenza dovuta alla #Generazione di onde a prua e poppa Resistenza dovuta al trascinamento di lamine viscose Resistenza dovuta all'attrito tra opera morta e aria
Resistenza di attrito tra opera viva e acqua
dove:
Coefficiente di scabrezza ( per carene metalliche nuove) Superficie della carena in Velocità della nave in Densità dell'acqua
È la resistenza di attrito dovuta al trascinamento di lamine di acqua da parte della carena fino a una distanza limite
Generazione di onde a prua e poppa
dove:
Dislocamento: la massa d'acqua spostata dalla carena in tonnellate Coefficiente di finezza (snellezza): il rapporto tra il dislocamento e il volume del parallelepipedo equivalente nel quale risulta iscritta l'opera viva Velocità della nave in nodi Lunghezza della carena in
Viene ridotta con l'adozione del Bulbo di Taylor
Resistenza aerodinamica
dove:
Area proiezione ortogonale alla direzione del moto della sezione trasversale dell'opera morta Velocità della nave in nodi Velocità del vento in nodi Angolo tra la direzione del vento e asse longitudinale della nave
In assenza di vento si considera
Resistenze al moto per aeromobili
Le resistenze di cui tenere conto negli aeromobili sono dovuta al variare:
- della viscosità e della densità dell'aria
- della forma e dell'assetto dell'aeromobile
- del carico Q ovvero del carico alare
- della velocità del vento relativo
Nomenclatura aeromobili
❗❗❗❗❗❗❗❗❗❗❗❗❗
❗❗❗ COMPLETARE ❗❗❗
❗❗❗❗❗❗❗❗❗❗❗❗❗