03. Equazioni non lineari
pdf:: [[3. Equazioni non lineari - ANEP - Pitolli.pdf]]
L'analisi numerica è la scienza degli errori
Approssimare soluzioni equazione non lineare
3. I metodi numerici
Il calcolo numerico è quella branca della matematica che costruisce e analizza i metodi numerici atti a risolvere, con l'aiuto del calcolatore, differenti problemi matematici che nascono da varie discipline.
Immaginiamo di voler progettare un serbatoio sferico per la raccolta d'acqua da installare in un piccolo villaggio in una regione arida
Il primo passo è la #Errori inerenti.
Si passa quindi alla formulazione di un #Modello matematico. Nel nostro caso consiste nella formula per calcolare il volume del liquido noto il raggio
Sia il serbatoio di raggio
Dati
- Raggio
- Periodo
- Persone
Dati stimati
- Consumo minimo
a persona - Litri d'acqua
- Volume dell'acqua
Modello matematico
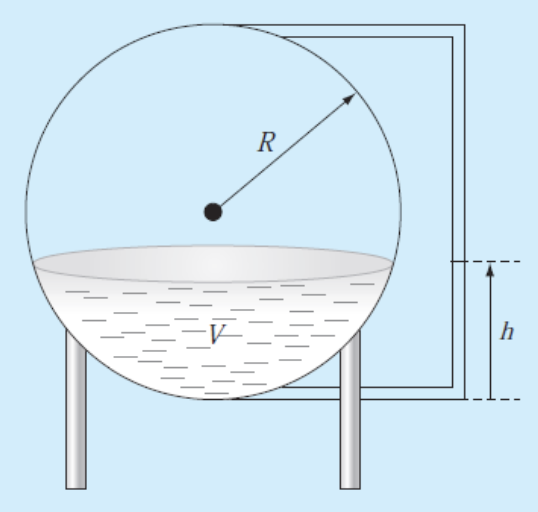
Sappiamo che il volume del liquido contenuto nel serbatoio può essere calcolato dalla formula:
dove
Soluzione
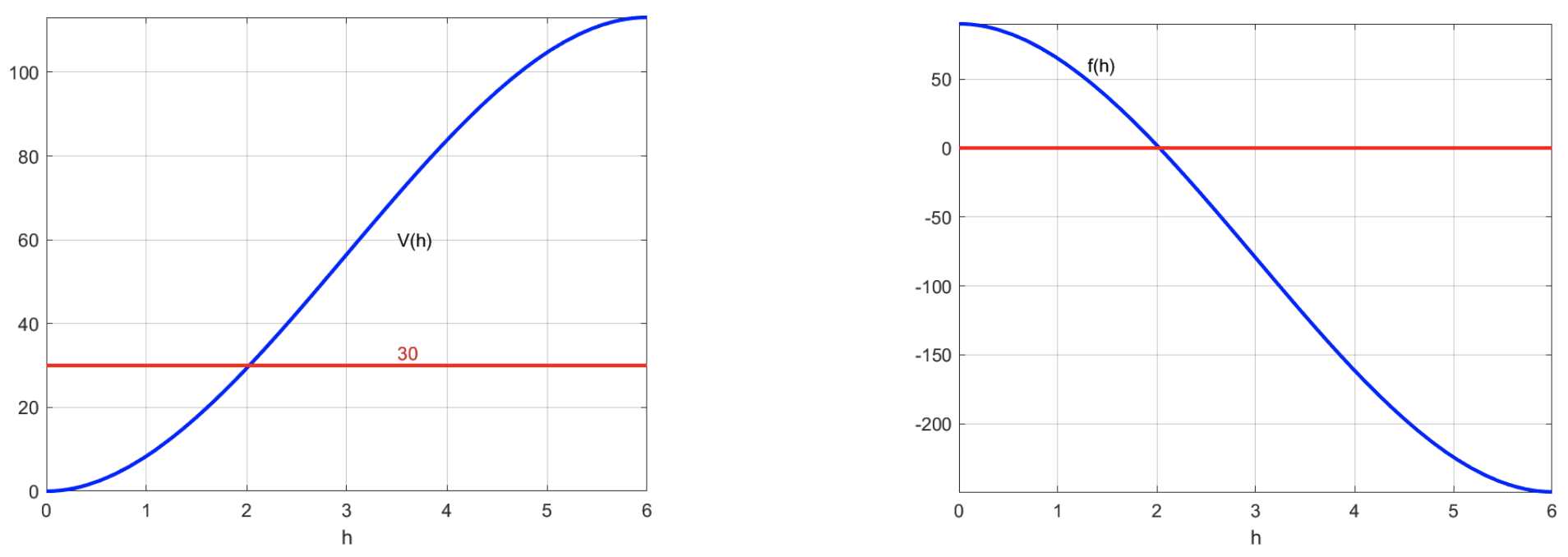
Voglio trovare l'altezza
- Problema
- Schematizzare
- Tradurre in linguaggio matematico --> Errori inerenti
- Modello matematico
- Metodo Numerico --> Errore di troncamento
- Algoritmo --> Stabilità
- Soluzione numerica --> Errori di arrotondamento (il calcolatore lavora con un numero limitato di cifre significative)
Risoluzione di un problema con i metodi numerici
Descrizione del problema fisico
Si comincia dalla descrizione del problema.
Si registrano le misure fornite, azioni (forze) in gioco. Si fanno le dovute approssimazioni.
Traduzione del problema in linguaggio matematico
Il problema fisico deve essere tradotto in equazioni matematiche. Una volta fatto ciò avremo a disposizione un #Modello matematico.
Modello matematico
Alcuni esempi di modelli matematici nella #Traduzione del problema in linguaggio matematico sono:
- Sistemi di equazioni non lineari (equilibri chimici, ottimizzazione)
- Integrali (aree, volumi, energia)
- Sistemi di equazioni differenziali
Quando si costruisce un modello matematico si compiono alcuni errori detti [[#Errori inerenti]].
Errori inerenti
Gli errori inerenti sono gli errori che si commettono nella costruzione di un [[#Modello matematico]].
Metodo numerico
Una volta definito il modello si passa all'utilizzo di un metodo analitico (se possibile) o un metodo numerico per trovarne la soluzione.
Quando si usano i metodi numerici si devono costruire degli algoritmi compiono #Errori di troncamento
Intervallo di separazione
Il primo passo da seguire è quello di isolare la soluzione del problema che si vuole risolvere.
L'Intervallo di Separazione è un intervallo in cui abbiamo individuato un'unica soluzione del problema.
dove
Errori di troncamento
Gli errori di troncamento sono gli errori che si compiono nell'applicazione di un #Metodo numerico. Ad esempio, se applico il metodo di bisezione l'errore di troncamento è quello che compio per essermi fermato dopo 5 iterazioni piuttosto che un numero maggiore.
Algoritmo
Applicare un #Metodo numerico significa scrivere un algoritmo che possa essere reiterato un numero finito di volte per arrivare sempre più vicino al risultato reale del problema. Quando si costruisce un algoritmo è bene assicurarsi che sia stabile. È infatti possibile che il risultato esploda dopo un certo numero di reiterazioni.
Soluzione numerica
Dopo aver applicato il #Metodo numerico si arriva finalmente alla soluzione numerica al problema.
È importante a questo punto interpretare il risultato e assicurarsi che la soluzione abbia senso (non possiamo avere ad esempio masse negative).
In questa fase si deve inoltre fare attenzione a un'ulteriore causa di errore: gli #Errori di arrotondamento
Errori di arrotondamento
I calcolatori lavorano con un numero finito di cifre significative. Quando rappresentano un numero con molte cifre (ad esempio
L'arrotondamento è la prima fonte di errore. I dati di input, che hanno un numero infinito di cifre, vengono trasformati, tramite arrotondamento, in numeri macchina, con un numero finito di cifre.
I polinomi
Se però calcoliamo i loro valori numericamente nell'intervallo
| x | Valore esatto | Errore di arrotondamento | ||
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 |
| 1.0001 |
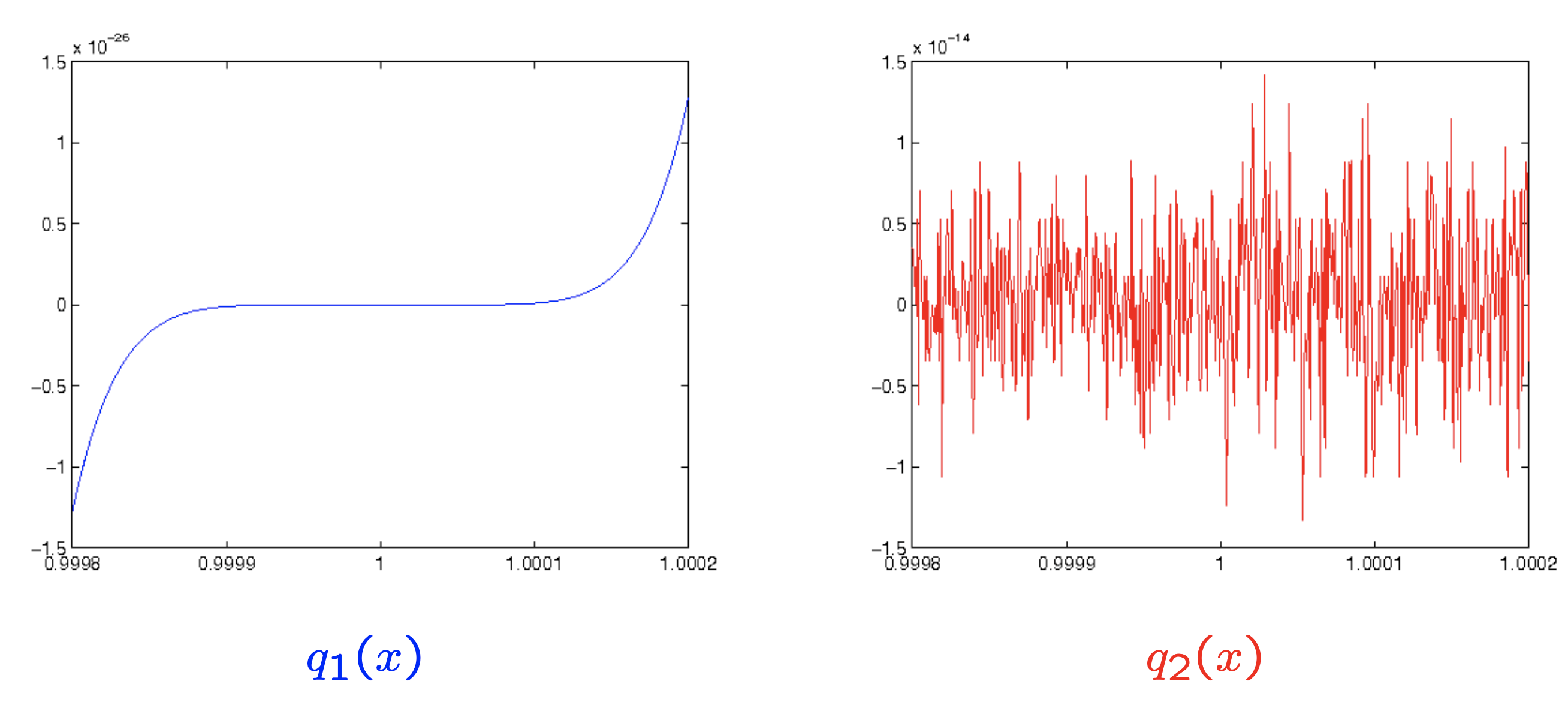
Cancellazione numerica
Un errore che si verifica quando calcoliamo la differenza di due numeri molto vicini.
Algoritmo
Successione di istruzioni, finita e non ambigua, che consente di ottenere risultati numerici a partire dai dati di input.
Gli algoritmi vengono poi implementati in un linguaggio di programmazione.
Stabilità di un algoritmo
Anche quando l'errore di arrotondamento è piccolo, la sua propagazione può avere effetti disastrosi. Essi possono infatti venire amplificati, rendendo in questo caso la soluzione del tutto inaffidabile. In questo caso si dice che l'algoritmo è instabile.
Metodi numerici per la soluzione di problemi non lineari
Libro: 3.4
Metodo di bisezione
3.1 Il metodo di Bisezione
Il metodo di bisezione è un metodo numerico che consiste nel dimezzare di volta in volta l'Intervallo di separazione e usare il punto medio di tale intervallo come approssimazione della soluzione
Consente di costruire una successione {
☑️ Ipotesi
Algoritmo

Individuato unIntervallo di separazione
Ora controllo in quale tra gli intervalli
Una volta individuato l'intervallo, ripeto il procedimento usando quello come nuovo intervallo di separazione. Supponiamo ad esempio che la soluzione cada nell'intervallo
Chiamo
Continuando a ripetere questo processo, ammesso che il metodo converga,
- Input:
per - se:
Errori
Errore di troncamento
Nell'applicazione del metodo di bisezione, compiamo un Errore di troncamento dovuto quindi al numero di iterazioni che compiamo
Convergenza
Calcolo l'errore
A sua volta l'ampiezza dell'intervallo
$
\begin{align}
|e_{k}| = |\xi - x_{k}| \le & \frac{b_{k-1} - a_{k-1}}{2} \
&\le \frac{1}{2} \frac{b_{k-2}-a_{k-2}}{2} \
\vdots \
&\le \frac{1}{2^{k}} (b_{0}- a_{0})
\end{align}
\Rightarrow |e_{k}| = |\xi - x_{k}| \le \frac{1}{2^{k}} (b_{0} - a_{0})
\lim_{k \to \infty} |e_{k}| = \lim_{k \to \infty} \left|\frac{1}{2^{k}}(b_{0}-a_{0}) \right| = 0
$
Ordine di convergenza
Il metodo di bisezione ha ordine di convergenza pari a 1:
Dimostrazione:
Ricordo che:
e che:
per cui
con
Stima iterazioni necessarie
Per ottenere l'approssimazione della soluzione con una tolleranza scelta
Risolvendo per
$
\begin
2^{k} &\ge \frac{b-a}{\varepsilon} \
log_{2}\left( 2^{k} \right) &\ge log_{2}\left( \frac{b-a}{\varepsilon} \right) \
k &\ge log_{2}\left( \frac{b-a}{\varepsilon} \right)
\end{align}
$
Tenendo presente che
Criterio di arresto
Criterio di arresto a posteriori
Posso interrompere l'algoritmo quando l'errore al passo k è minore di una tolleranza scelta
Implementazione in Matlab
function [soluzioneApprox,erroreStimato, iterazioniNecessarie] = MetodoBisezioneNonLineari(estremoInferiore, estremoSuperiore, funzione, tolleranza, numeroMaxIterazioni)
% Questa funzione serve ad applicare il metodo di bisezione a una funzione
% assegnata per ricavarne la soluzione approssimata.
% Input:
% estermoInferiore, estremoSuperiore: Estremi dell'intervallo di separazione
% funzione: la funzione, definita come anonymous function, a cui
% applicare il metodo
% tolleranza: La tolleranza con la quale si vuole trovare la soluzione
% numeroMaxIterazioni: Il numero max di iterazioni che si vogliono
% provare prima di interrompere il calcolo. (Se non specificato è
% inizializzato a 100
% ------------
% Outpu:
% soluzioneApprox: la soluzione approssimata
% erroreStimato: la media degli errori calcolati come b-a e come f(xn)
% iterazioniNecessarie: Il numero di iterazioni necessarie alla stima
% dell'errore
% Cerco la radice di una funzione f nell'intervallo [a,b] con il metodo di
% bisezione
% Suppongo di aver già individuato gli estremi degli intervalli di
% separazione
% Sfrutteremo un criterio di arresto basato sulla tolleranza:
% f = Funzione della quale vogliamo cercare la radice
% a = Estremo inferiore in cui è stata isolata la radice
% b = Estremo superiore in cui è stata isolata la radice
% toll = Tolleranza (\tollilon)
% numeroMaxIterazioni = Massimo numero di iterazioni
f = funzione;
% So che nell'intervallo definito sotto sicuremante ci sarà una soluzione
a = estremoInferiore;
b = estremoSuperiore;
% Definisco la tolleranza
toll = tolleranza;
maxIter = 100;
maxIter = numeroMaxIterazioni;
% Vogliamo calcolare:
% xn: Approx della radice
% err1 = |x(n) - x(n-1)|
% err2 = f(xn)
% iter = Numero di iterazioni
format long
% Inizializzo i parametri necessari
iter = 0; err1 = b-a; err2 = toll+1; x0 = a;
% Verifico che la radice esista
if f(a)*f(b) > 0
error('Non ci sono soluzioni nellintervallo [a,b]') % Con questo comando blocco l'esecuzione dello script
elseif f(a)*f(b) == 0
if f(a) == 0
xn = a;
elseif f(b) == 0
xn = b;
end
return % Return perché non voglio andare avanti se queste condizioni del secondo if sono rispettate
end
% Calcolo successione
while (err1 > toll) && iter < maxIter
xn = (a+b)/2;
if f(a)*f(xn) < 0
b = xn;
elseif f(xn)*f(b) < 0
a = xn;
end
iter = iter + 1;
err1 = abs(xn-x0);
err2 = abs(f(xn));
x0 = xn;
end
soluzioneApprox = xn;
erroreStimato = abs((err1 + err2)/2);
iterazioniNecessarie = iter;
end
Metodi iterativi a un punto
Si parla anche di metodi delle approssimazioni successive o dell'iterazione funzionale.
Un metodo di risoluzione consiste nel riformulare il problema dato riscrivendolo in una forma che sia più semplice da risolvere.
L'equazione
può infatti essere riscritta come
in un certo intervallo di separazione
Se
Equazione di punto unito
Applicando questo metodo, il valore
è detto punto unito e l'equazione è detta equazione di punto unito.
Geometricamente, trovare il punto unito di
L'equazione
può essere riscritta in varie forme, tra cui:
$
\begin
x = \varphi_{1}(x) = \sqrt{x+2} & x = \varphi_{2}(x) = - \sqrt{x+2} \
x = \varphi_{3}(x) = x^{2}-2 & x = \varphi_{4}(x) = 1+ \frac{2}
\end{matrix}
$
A questo punto si può scrivere la soluzione approssimata tramite un metodo iterativo a un punto:
e l'obbiettivo è cercare la
ossia proprio il punto unito.
Metodo Approssimazioni successive
Per approssimare un punto unito si può utilizzare il metodo delle approssimazioni successive:
La funzione
Convergenza per punto unito
Definito l'errore di troncamento
che equivale a dire
ALLORA
e
dove
CN di convergenza per punto unito
Se la successione
è Convergente a un valore
allora
Criterio di arresto per punto unito
Se il metodo è convergente, una buona approssimazione di
Alcuni metodi
I metodi seguenti sono esempi di metodi alle approssimazioni successive:
Metodo di Newton
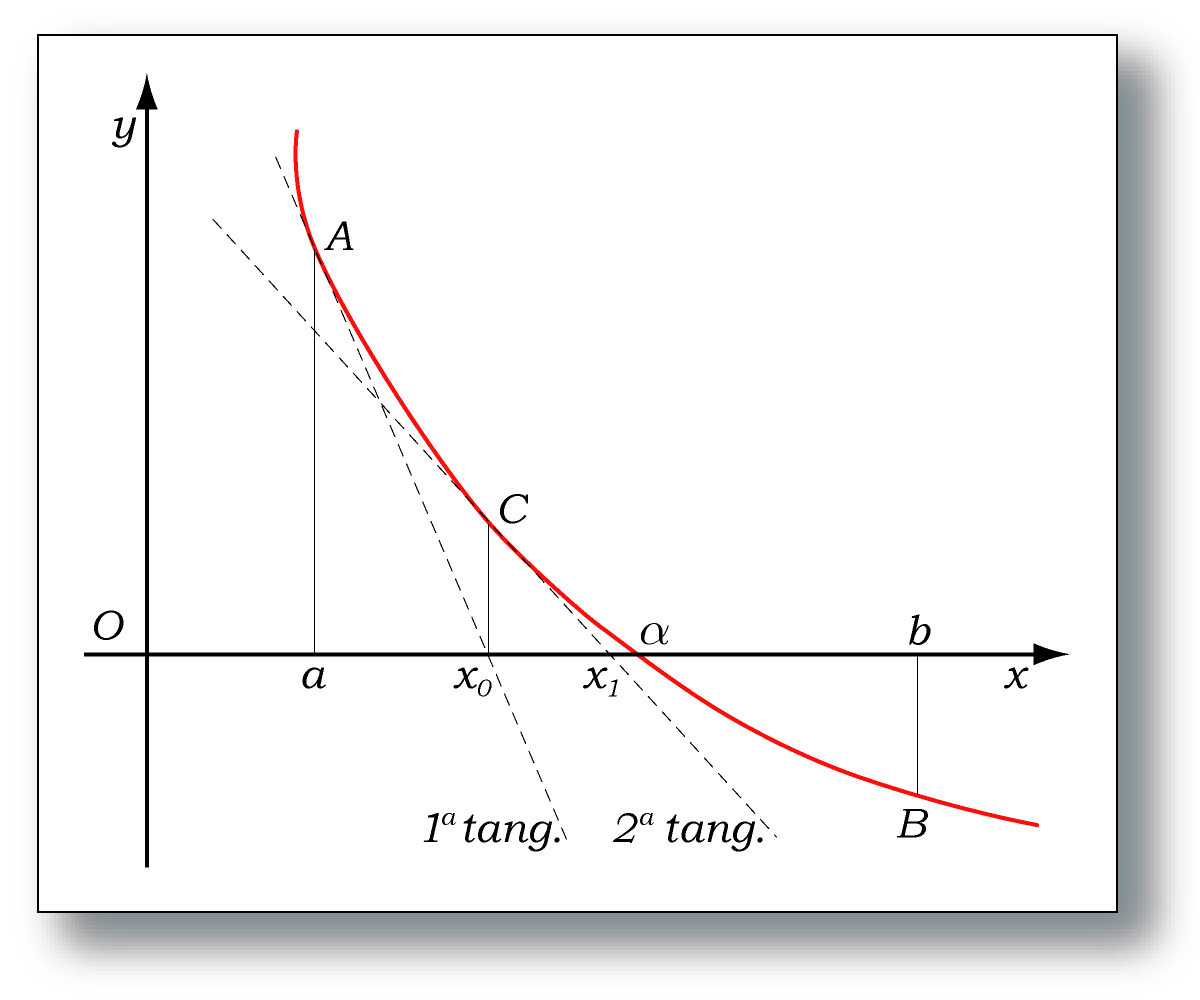
3.2 Il metodo delle Tangenti
Il metodo delle tangenti, detto anche metodo di Newton sfrutta il Polinomio di Taylor per approssimare il valore delle funzioni. In questo caso è necessario scegliere un'approssimazione iniziale
Si tratta di fatto di un metodo di linearizzazione. Infatti, come vedremo, interromperemo il Polinomio di Taylor al primo ordine, confondendo quindi il valore della funzione con il valore della tangente.
☑️ Ipotesi
Per l'applicabilità del metodo di newton, la funzione deve rispettare le seguenti ipotesi:
Algoritmo
Scelgo un'approssimazione iniziale
Approssimo la funzione
Se cerco la radice di
da cui
motivo per cui dobbiamo imporre anche
Dopodiché approssimo nuovamente la funzione con Taylor usando stavolta
da cui
Continuo ad iterare questo procedimento. Avrò così, in definitiva:
Il metodo convergerà per alcuni valori di
Convergenza
Sia
Sia:
Allora esiste un intorno
Inoltre, se
Sia:
per
- Esiste un unico
, tale che - La successione
è monotona e converge a - Se
, la convergenza è quadratica
Estremo di Fourier
Se
Supponiamo di avere una funzione monotona, senza massimi o minimi locali, a concavità fissa.
L'estremo di Fourier di un intervallo è quello dei due tale che il prodotto
Ordine di convergenza
Per calcolare l'ordine di convergenza devo calcolare il limite:
Calcolo
essendo
$
\begin{align}
|e_{k+1}| = \xi - x_{k+1} &= \left( \xi - \frac{f(\xi)}{f'(\xi)} \right) - x_{k+1} = \
&= \left( \xi - \frac{f(\xi)}{f'(\xi)} \right) - \left( x_{k} - \frac{f(x_{k})}{f'(x_{k})} \right) = \
&= (\xi - x_{k}) - \left( \frac{f(\xi)}{f'(\xi)} - \frac{f(x_{k})}{f'(x_{k})} \right) = \
\end{align}
$
Sviluppando
$
\begin
|e_{k+1}| &= \left|
e_{k} - \left( \frac{f(\xi)}{f'(\xi)} - \frac{f(\xi) + f'(\xi)(-e_{k}) + \frac{1}{2} f''(\xi)e_{k}^{2} }{f'(\xi)} \right)
\right| \
&= \frac{1}{2} \left| \frac{f''(\xi)}{f'(\xi)} \right| |e_{k}^{2}|
\end{align}
$
Si ha quindi che
quindi
Allora l'ordine di convergenza del metodo delle tangenti è
Implementazione in Matlab
function xk = tangenti(x0,f, df, N_max)
% Input:
% x0: approx iniziale
% f, df: funzione e derivata
% N_max: numero di iterazioni
%
% Output:
% xk: approx dello zero
for i = 1:N_max
xk = x0 - f(x0) / df(x0);
errk = abs(xk - x0);
x0 = xk;
fprintf('k = %3i x_k = %14.12f err=%9.3e f=%18.12f f''=%18.12f \n', i, xk, errk, f(x0), df(x0));
end
end
Metodo di Newton in
Al link 03.4 Metodo di Newton in n dimensioni
Se in
Sia
dove
$
\boldsymbol J_F(\boldsymbol X) =
\begin
\frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & \dots &\frac{\partial f_1}{\partial x_n} \
\frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} & \dots &\frac{\partial f_2}{\partial x_n} \
\vdots & \vdots & \ddots & \vdots \
\frac{\partial f_n}{\partial x_1} & \frac{\partial f_n}{\partial x_2} & \dots &\frac{\partial f_n}{\partial x_n} \
\end{bmatrix}
$
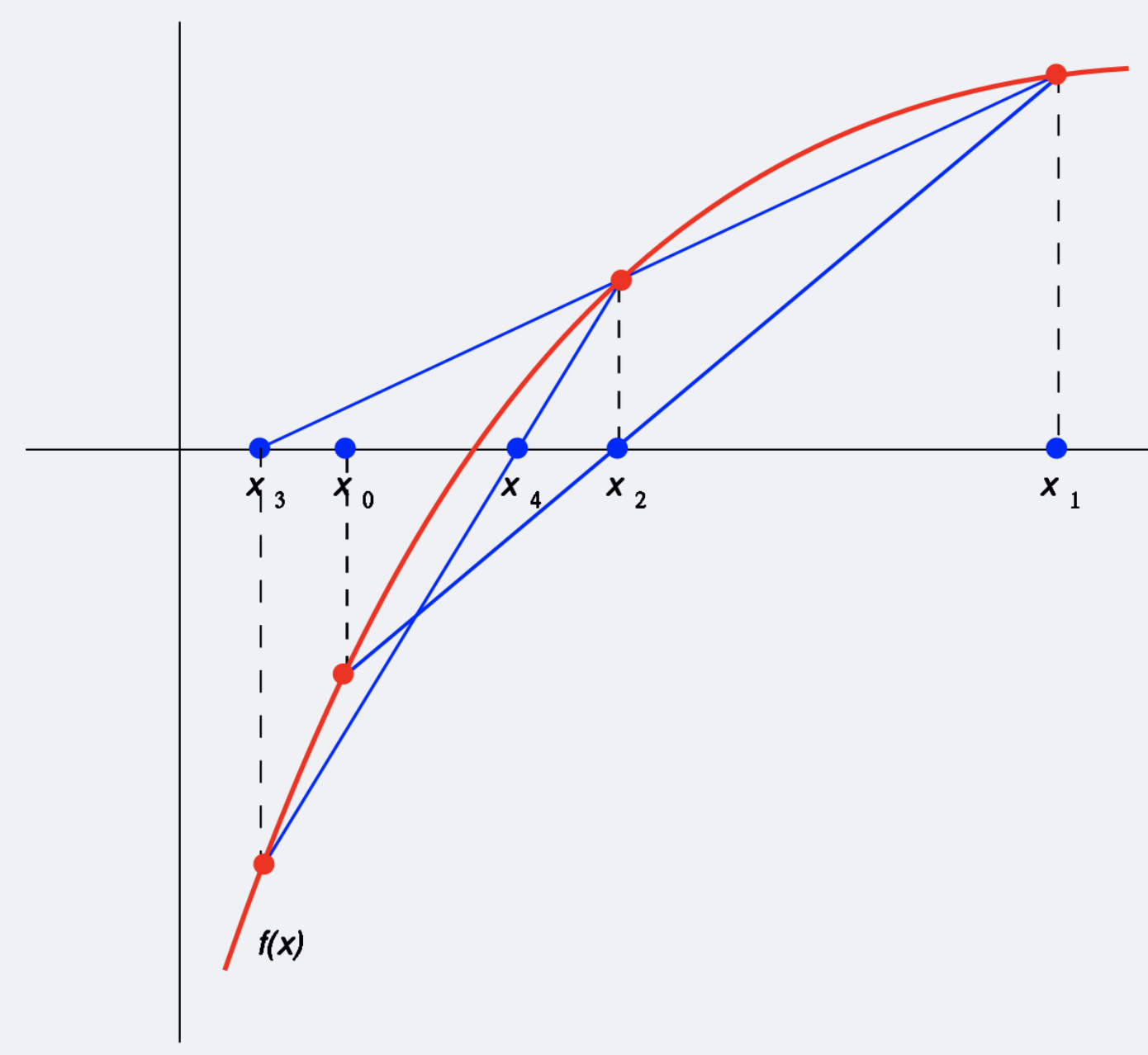
Metodo delle secanti
3.3 Metodo delle Secanti
Il metodo delle Secanti consiste nell'approssimare localmente la funzione con la retta secante passante per i due estremi dell'intervallo
☑️ Ipotesi
allora il metodo converge per allora il metodo converge
Algoritmo
Scelgo 2 approssimazioni iniziali:
Poi, per
Convergenza
Se:
intervallo di separazione, simmetrico intorno la radice per
Allora esiste un intorno
In particolare, se
Ordine di convergenza
L'ordine di convergenza del metodo delle secanti è
Essendo maggiore di 1 ma minore di 2 si dice che ha ordine di convergenza sopralineare.
Implementazione in Matlab
function [xk,errk, iter] = secanti_tol(x0,x1, f, N_max, tol)
% Input: (x0, x1, f, N_max, tol)
% x0, x1: Approx iniziali
% f: Funzione di cui trovare gli zeri
% N_max: Numero di iterazioni
% tol: Tolleranza richiesta
%
% Output:
% xk: approx dello zero
% errk: Errore alla k-esima iterata
% iter: Numero di iterazioni effettuate
errk = tol + 1;
iter = 0;
while (iter < N_max) && (errk > tol)
xk = x1 - f(x1)* (x1-x0) / (f(x1) - f(x0));
errk = abs(xk-x1);
x0 = x1;
x1 = xk;
iter = iter + 1;
end
fprintf('xk = %f', xk)
end
Sistemi di equazioni NON lineari
I #Metodi iterativi a un punto permettono di risolvere anche sistemi di equazioni non lineari
anche se le cose si complicano non poco.
È necessario per prima cosa riscrivere il sistema in forma matriciale.
Si ha infatti che il sistema è equivalente a:
dove
Esplicitando si ha che:
con
Sia
tale che
Possiamo applicare il metodo del punto unito trasformando il sistema
con
Si può in questo modo applicare un metodo iterativo per cui:
Dove
Errore di troncamento in
Convergenza in
Si dice che il metodo converge se
Distanza Euclidea
Dati due vettori:
Metodi per sistemi non lineari
Metodo di Newton in n dimensioni
Risoluzione esercizi
- Cercare intervallo di separazione
- Provare a scrivere nella forma
- Studiare monotonia di
e - Verificare l'esistenza di soluzioni in tutti gli intervalli a disposizione
- Scrivere intervallo di separazione finale
- Provare a scrivere nella forma
- Verificare Condizioni di convergenza di uno dei metodi
- Stimare, se serve, il numero di iterazioni necessario con la formula del metodo di bisezione:
- Applicare il metodo