02 - Public Transport - SM
02 - Public Transport - SM
!
Definitions
Public transport
The definition of public transport (PT) is not unanimous. Differente people categorise as PT different modes of transportation.
Public transport (or public transportation, or pablic transit or mass transit) is a system of transport for passengers by group travel systems available for use by the general public, typically managed on a schedule, operated on established routes and that charge a posted fee for each trip
Examples of PT are:
- Buses
- Trolleybuses
- Trams (or light rail) and passenger trains
- Rapid Transit (metro/subway/underground)
- Ferries
Public transport between cities is dominated by airlines, coaches and intercity rail (or high speed rail).
The definition provided has some limitations:
- "managed on a schedule" and "operated on established routes": this is not always true, especially in the case of Demand Responsive Transit;
- "charge a posted fee for each trip": we now have examples of cities or countries where public transport is free
Most PT systems run along fixed routes on a prefixed timetable. More frequent services run to a headway.
In basically every case, using public transport includes using at least one other mean of transportation (walking, driving...).
Public transport can then be classified following different criteria.
Public transport classification
2 possible classifications of public transport are:
Operation classification
- Schedule based service
- Frequency based service
- Flexible on-demand
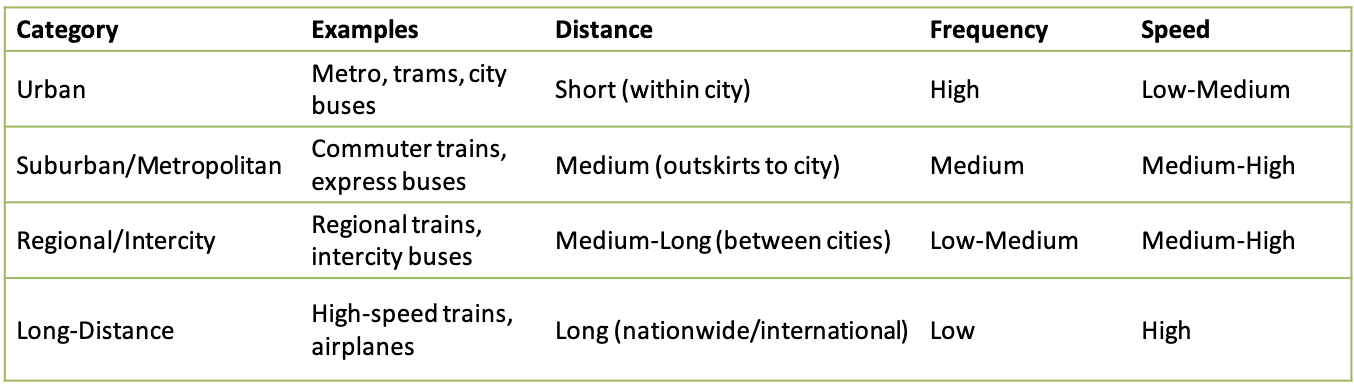
Coverage classification
- Urban
- Suburban/metropolitan
- Regional/intercity
- Long-Distance
Public transport route types
- Radial routes
- Circular routes
- Grid routes
- Linear routes
- Feeder routes
- Express routes
- On-demand/flexible routes
Public transport characteristics
PT - Public vs private
Public transport refers to shared transportation services that are available to the general public, typically operated and regulated by the government or public agencies.
On the other end, private transport refers to modes that are owned and used by individuals or specific groups, rather than being open to the general public.
PT - Collective vs individual
Collective transport is a mode where multiple passengers share a vehicle or service, typically following a fixed route and schedule.
Individual transport is a mode where the user has full control over route and schedule, often using a private or exclusive vehicle.
PT - Urban vs Suburban
- Urban transport focuses on high-frequency, short-distance trips within cities
- Non-urban transport connects suburban, regional and intercity areas with longer distance services and lower frequencies
PT - Fixed routes vs flexible on-demand routes
Fixed routes PT operate on predefined routes and schedules, stopping at designated point regardless of passenger demand.
Flexible or on-demand PT adjusts its routes, stops or schedule based on real-time passenger requests.
PT - Dedicated vs shared infrastructure
Dedicated infrastructure is fully reserved for one kind of transport mode: exclusive lanes, . tracks or spaces. They prevent interference with private vehicles
Shared infrasrtcuture can be used by both PT and private vehicles.
PT - Frequency, scheduled and on-demand
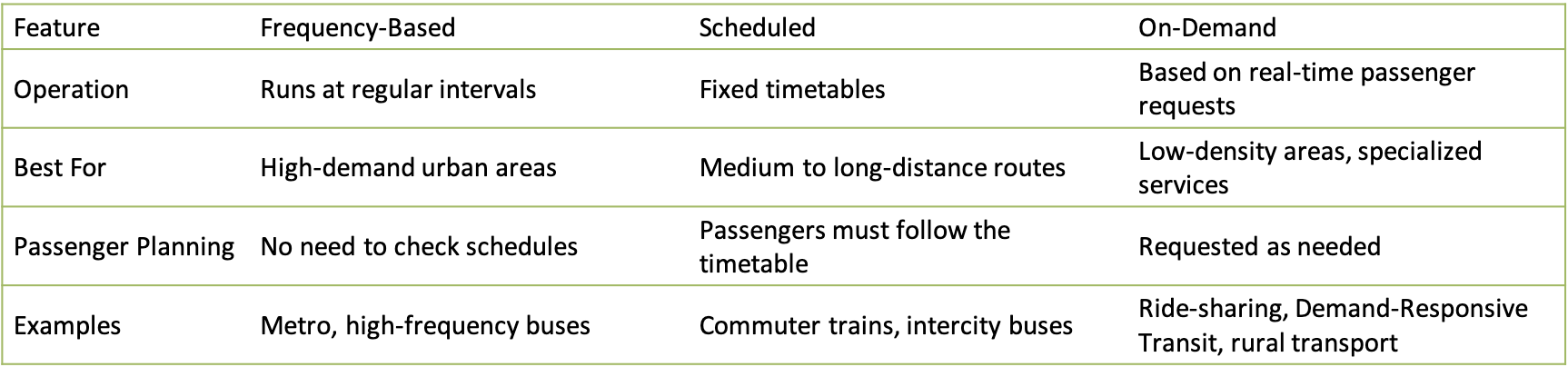
- Frequency based transport is best for high-demand urban areas offering short waiting times and reliability
- Scheduled transport is convenient for long distance services and for commuters, requiring planning
- On-demand transport provides flexibility for low-density areas
PT - Access vs Affordability
Access in PT refers to how easily people can reach and use the transport system. It includes physical, geographic and social factors that determine whether transport is available to all users.
- A dense metro network that covers an entire city
- Bus stops within walking distance of most residencies
- Wheelchair-accassible buses and stations
- Real-time apps and wayfinding for better passenger navigation
Affordability refers to how much passengers have to pay for using transport relative to their
income.
- Subsidized metro fares in major cities
- Discounted transport for students, seniors and disabled people
- Free public transport policies
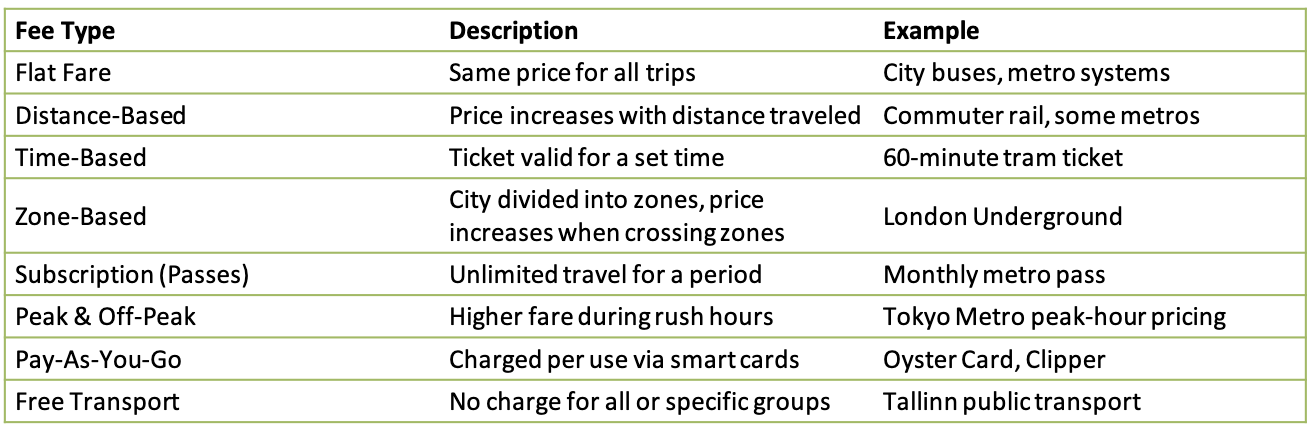
PT - Types of fares
Public transport generalised cost
PT operations make up for a big part of the cost for a PT system. There are mainly 2 players in terms of cost:
- Operator costs:
- Infrastructure
- Vehicles and associated costs
- Workforce and fleet
- User costs:
- Time consumption
- Access
- Fee
In respect to PT design, both components have to be accounted for and be part of the design process.
One of the most common approaches to network design is the Parsimonious models.
[[Parsimonious models for Public transport network design]]
Parsimonious models carry various advantages:
- [p] They have few assumptions and analytically tractable --> they provide a close solution
- [p] Low data requirements
- [p] Low computational complexity
- [p] Better system representation
- [p] Greater transparency
- [p] Higher sharpness or insight
for these reasons they are often used to analyse large transportation systems and can be physically realistic and accurate
They rely on a [[#Continuous approximation method]]:
Continuous approximation method
This method allows for the development of [[#Parsimonious models]].
It consists in solving an optimisation problem in which we try to minimise the total cost defined as:
where:
is the length of the line
Finding the minimum means to derivate the function and set it equal to zero:
1D line
We will start by considering a 1 dimensional system with the following characteristics:
line length distance travelled by a generic user demand, uniformly distributed along the line length vehicle cruising speed vehicle constant acceleration/deceleration boarding and alighting time per passenger walking speed
Decision variables:
stop spacing (distance between stops) vehicles headway (time distance between 2 consecutive vehicles)
We need to find the total cost of travelling along the line. We have to distinguish:
- [[#User cost]]
- [[#Operator cost]]
User cost
The user cost can be decomposed in 3 components, relating to time:
- [[#Access time]] - [[#Waiting time]] - [[#In Vehicle Travel Time]]
From that we will calculate the [[#User Generalised Cost]], as:
where:
value of time trip fare
User travel time
Access time
The Access time is the time it take the passenger to get from their origin to the closest bus stop (or from the stop to the destination).
Imagine we have a stretch of line like in the diagram:
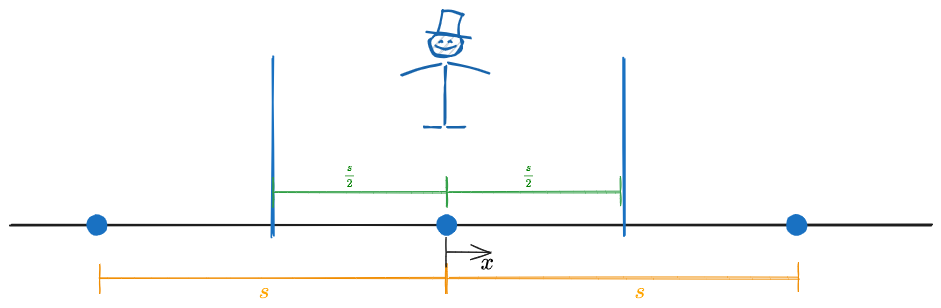
Ignoring the transversal distance between the start of the jurney and the closest stop (which cannot be influenced by changing the decision variable), we are interested in the distance that a passenger has to travel to reach the closest stop.
This distance could have any value between
Considering the worst case, in which every user has to walk at least
Waiting time
The waiting time is the time a generic passenger has to wait at a bus stop before the bus arrives.
The extreme cases are:
- The bus arrives exactly at the same time as the user, then the waiting time is
- The bus leaves exactly as the user arrives, than they have to wait for the next bus:
The average waiting time is:
In Vehicle Travel time
The in vehicle travel time is the time that the generic passenger spends in the vehicle for their trip. It accounts for dwell times and acceleration. It can be divided in 3 components:
- Time spent travelling at constant speed
- Time spent accelerating and decelerating
- Time spent for passengers boarding and alighting
To evaluate these, it's useful to keep in mind a generic trajectory for a bus stopping at a bus stop:
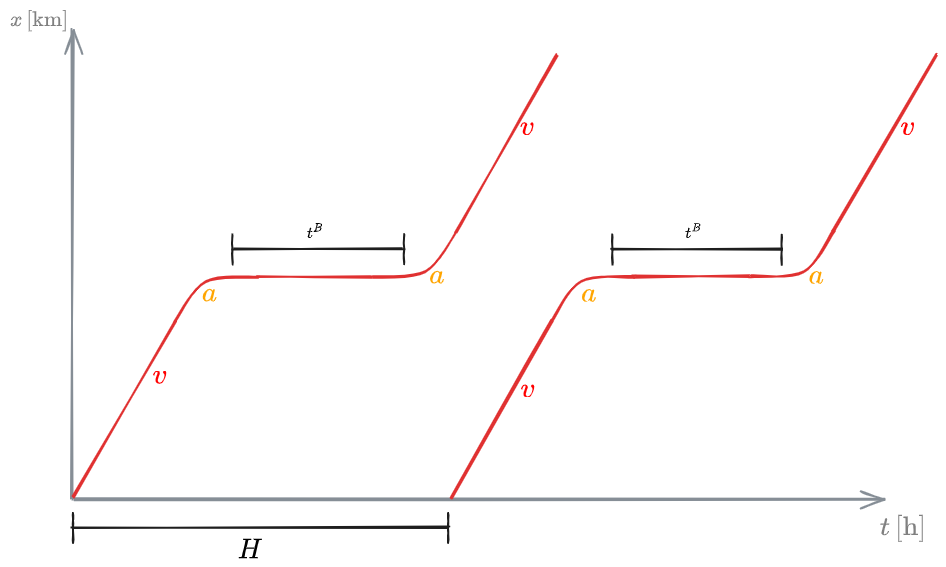
1 - Time spent travelling at constant speed
If the user travels for a distance
This slightly overestimates the actual time. This way in fact we are also considering the space where the vehicle is not travelling at constant speed.
- [?] This slightly overestimates the actual time. This way in fact we are also considering the space where the vehicle is not travelling at constant speed
2 - Time spent accelerating and decelerating
Along the distance travelled, we have
At each stop, the time spent accelerating is
At each stop, the time spent decelerating is
- [?] Shouldn't the acceleration time, according to uniformly accelerated motion, be
. Why are we using ? ⏫
Then, the time spent not travelling at constant speed at each stop is
3 - Time spent for passengers boarding and alighting
Lastly, we need to account for the dwell time.
In order to calculate this, we need to know how many passengers will board at each bus stop.
- If the general demand per hour is
, then, along the whole corridor, the number of passengers boarding each vehicle will be ; - We only have to account for the proportion of travellers along the stretch of length
. Therefore, we will need to multiply the demand per bus by ; - For one pax, the dwell time is
Then, for the whole trip, the time spent stopping for boarding operations is:
IVTT:
We can now write the In Vehicle Travel Time as the sum of the aforementioned components:
User Generalised Cost
The user generalised cost is given by:
where:
value of time trip fare
that we can write explicitly as:
Time perception
The calculations done in the previous sections does not account for the fact that users perceive time differently depending on what they're doing. Therefore, when calculating the [[#User Generalised Cost]] we should account for this factor. The following table shows average and ranges values for time perception at different phases of the trip:

Operator costs
The operator costs include mainly these components:
- [[#Corridor length]] - V - Distance travelled by the fleet per hour ([[#Operation]])
- M - [[#Fleet size]] (number of vehicles) and Work force per hour
After having calculated every one of the mentioned components, we can calculate the generalised operator cost:
where:
unitary cost of infrastructure per km and hour unitary cost based on distance travelled by fleet per hour unitary cost for fleet acquisition and crew operation
Corridor length
The corridor length is simply a constant:
We do not consider 2L as we are assuming a circular line. Then, the same infrastructure is used in both directions
Operation
The operation is caused by the distance travelled by the whole fleet per hour.
If the total length of the line is
Fleet size
The fleet size is given by the total amount of vehicles. In order to get this, we need the time spent by one vehicle to travel the whole corridor and divide it by the headway. The time spent by one vehicle is given by the corridor length over the [[#Commercial speed]].
Commercial speed
The commercial speed is the average speed of a vehicle in a transportation line, accounting for each slow down.
It's given by the total distance in the corridor over the time spent in the corridor (the [[#In Vehicle Travel time]] calculated for a trip length of
where
1D line optimisation problem
The problem to solve is then:
subject to:
where
is the transfer time Maximum vehicle occupancy during peak hour vehicle capacity
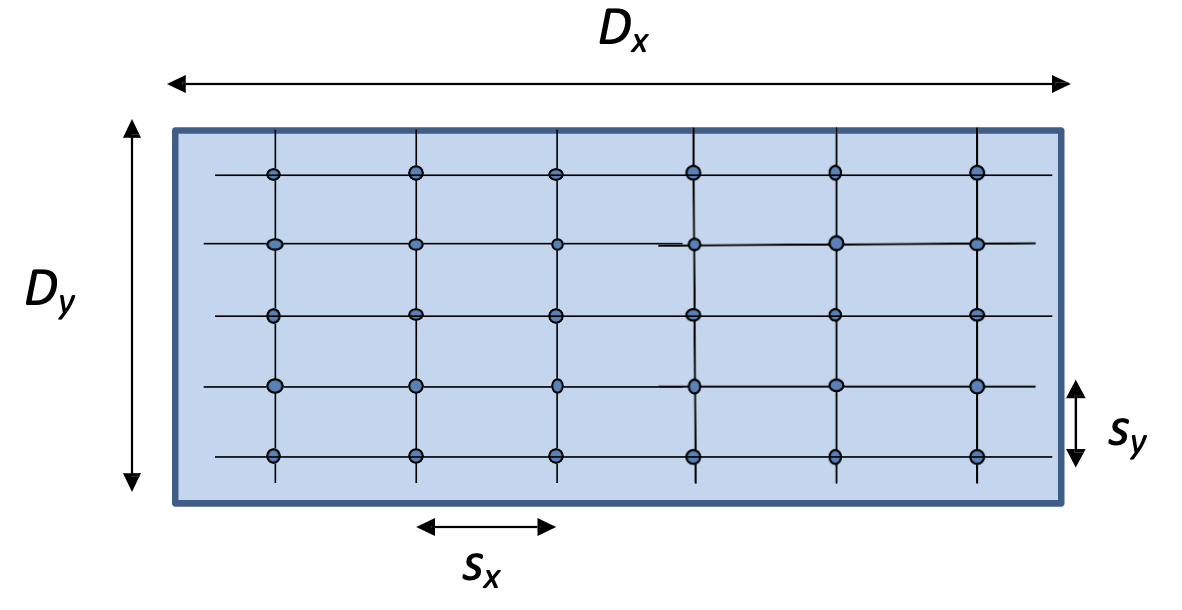
2D line
A similar problem to the [[#1D line]] can be defined for a 2D line, where transfers between lines are possible.
The easiest example is a grid system:
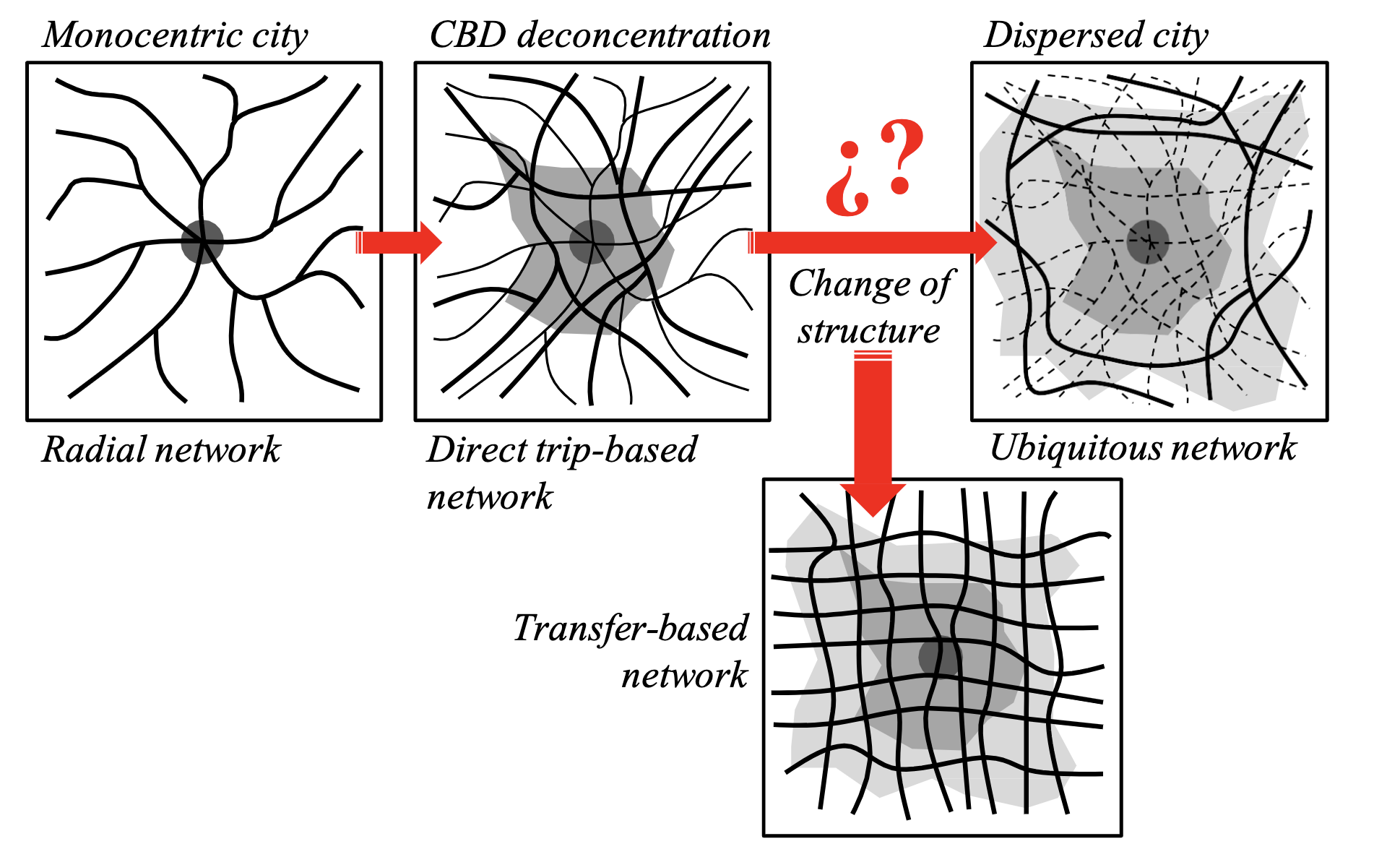
Network design approaches
When designing a PT network, different approaches can be followed.
One of the biggest difference is in having either a door-to-door line for every use case, or, on the contrary, basing the system on line transfers. They both have they're own advantages and disadvantages.
PT operations
Bus bunching
Bus bunching is a phenomenon in bus systems where 2 vehicles start running one right after the other, leaving a great gap somewhere else in the line.
The reason is the random passenger arrivals at the bus stops, since their individual boarding maneuvers delay the buses: if on arriving at a bus stop a bus finds more than the average number of passengers waiting, this bus will likely be delayed relative to the bus that precedes it. As a result the delayed bus may encounter more passengers on succeeding stops, and be delayed further. Further delays imply more passengers, which in turn imply more delay. This positive feedback mechanism is the reason[1]. But things are even worse... because as our bus falls behind schedule, it picks up passengers that should have been collected by the following bus. Thus, the following bus experiences less stopping delay so that it tends to catch up until the two buses eventually pair up and travel as a single unit. As time goes by pairs become bunches, until in the end there is a single moving unit. This is the bunching effect.
Read more about it at: http://faculty.ce.berkeley.edu/daganzo/Research/BusSim/index.html
Transit agencies often attempt to mitigate it by including extra time (slack) into their schedules, and then asking drivers to be punctual at selected control points along the route-even if this means delaying some buses. This method is of limited effectiveness because the slack has to be calculated by assuming a worst case scenario for the bus travel time between consecutive control points along the line, so that buses can stay on schedule despite disruptions. Worst case slack means slow travel times, which is not good for on board passengers-the medicine can be worse than the cure!
Today, as we can know the position of each bus real time, we can adopt real time strategies to avoid bus bunching.
More
Read more from slides