03 - Fundamentals of traffic flow modeling - OMT
03 - Fundamentals of traffic flow modeling - OMT
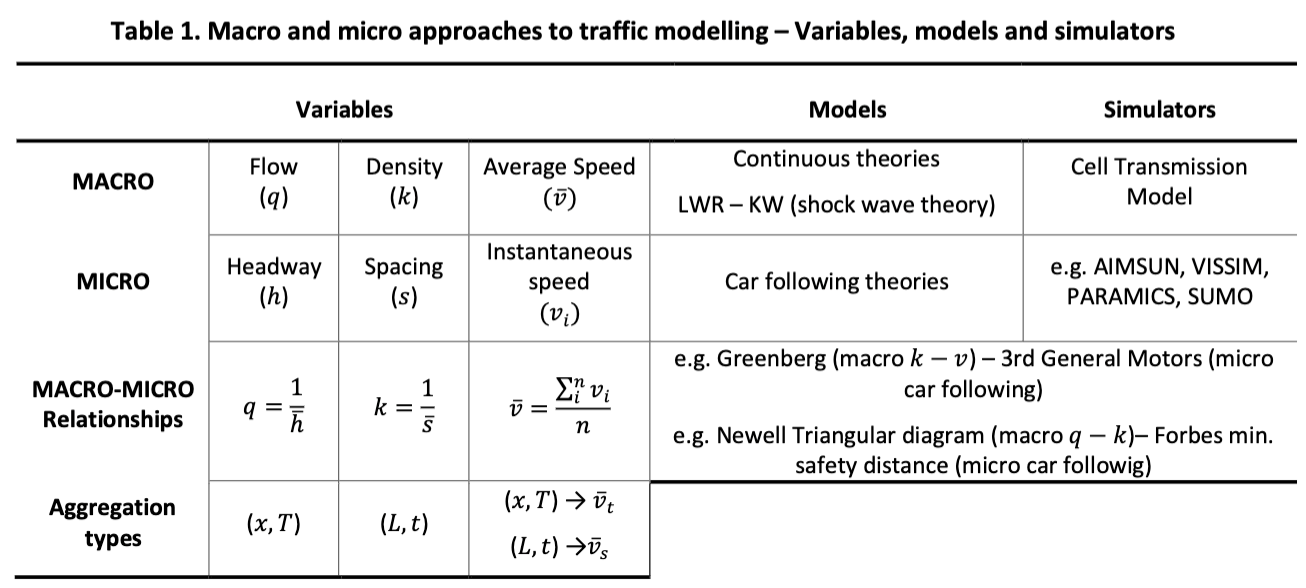
In traffic flow modeling, we can distinguish between
- Macroscopic models
- Microscopic models
In this chapter we will focus on #LWR Traffic flow theory.
Macroscopic models
Macroscopic models predict the evolution in time of the macroscopic variables:
- Flow -
- Density -
- Average Speed -
They are very robust: it's difficult for things to go wrong in calculation. They only use a few parameters (3).
They are known with many different names:
- Lightwill, Witham, Rehand (LWR) model
- Continuous Traffic Flow Model
- Shock-Wave theory
- Cinematic Wave Theory
And are solved by some simulators - Calculation can be done by hand
- Cell Transmission Model
Microscopic models
Microscopic models try to predict how one vehicle, the follower, follows another vehicle, the leader
Given the trajectory of the leader, we are interested in obtaining the trajectory of the follower.
They are very detailed, but use many many parameters (in the order of
In microscopic models, we work with microscopic variables:
- Headway -
- Spacing -
- Instantaneous speed -
Microscopic models are known as:
- Car following theories
And are solve by computer simulators:
- [[AIMSUM]]
- [[VISSIM]]
- [[PARAMICS]]
- [[SUMO]] - which is [[Open Source]]
LWR Traffic flow theory
LWR theory postulates
LWR theory is based on 2 postulates:
- #Conservation of vehicles
- #Equation of state
Conservation of vehicles
Given a control volume (space x time), the number of vehicles that enter the volume and that exit the volume must be equal.
Look at the trajectories in the following diagram:
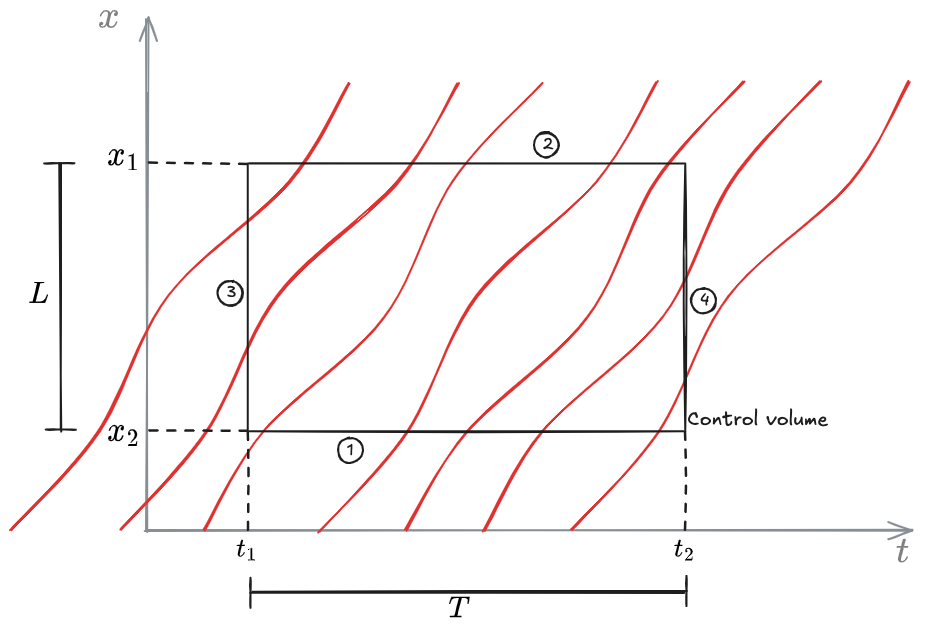
!!! The control volume is just a mathematical object. From now on we will refer to control area. The control area is the physical space that we are observing (for example, a stretch of road).
Let
Number of veh entering/exiting the control area Number of veh already in the control area
Then
The members can be rearrange to write:
We can express the conservation of vehicles principle as follows:
The difference between vehicles entering and exiting the control volume must be equal to the variation in storage in the control volume.
The last equation can be divided by the area of the control region in the graph:
where at one point we have substituted the definitions of flow and density. Finally, at limit, the equation can be written as:
The difference between vehicles entering and exiting the control volume must be equal to the variation in storage in the control volume.
Relative flow
Let's consider the following time-space diagram:
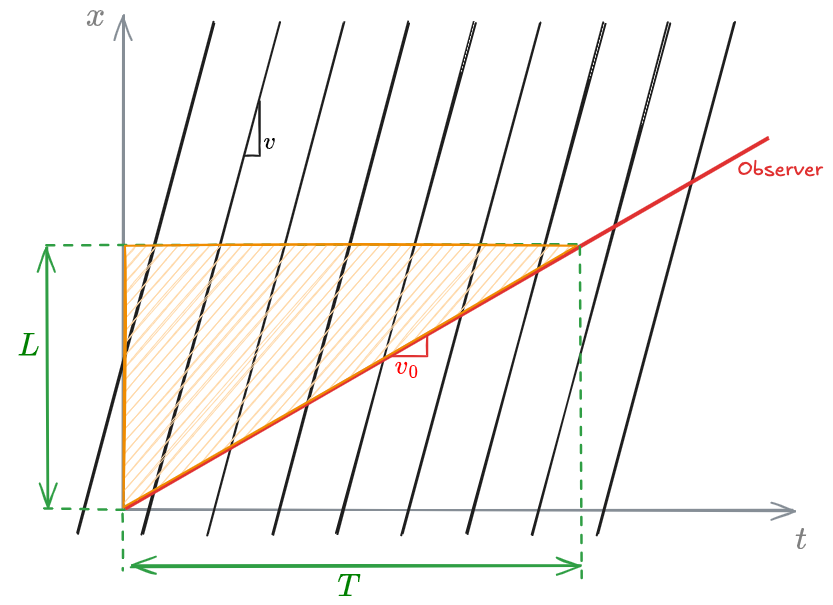
There are several vehicles traveling at speed
The [[#Conservation of vehicles]] applies for any control volume we consider. Therefore, it applies for the one indicated in orange in the graph.
Given that:
density of the vehicles traveling at speed Time span considered Space considered
then, we have that:
where
So:
according to the fundamental equation of trafic (
where
The relative flow, defined as
describes the amount of overtakes an observer experiences.
In case
Equation of state
The second postulate of the [[#LWR Traffic flow theory]] is the existence of an equation of state. This means that the state of the system can be univocally determined applying one equation to a state variable.
In the fundamental equation of traffic, we can write one state variable as a function of the other 2. To get to the required equation of state, we need to go down to 1 degree of freedom. We need 1 extra equation.
This relation will be obtained empirically, meaning it is a regression of some measurement.
Let's imagine taking data points of speed against spacing:
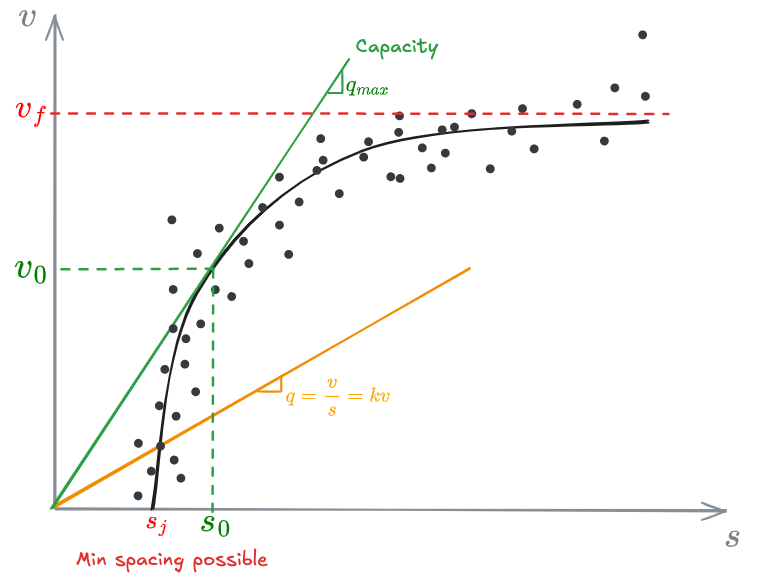
The graph shows the empirical relation between average speed and spacing. Notice that as spacing increases, also velocity increases until speed starts to approach a constant value,
Remembering the fundamental equation of traffic flow,
From this it's fairly easy to find the maximum flow, known as capacity of the infrastructure, as the tangent line.
From the state diagram, we can also define some new concepts:
- [[#Congestion regime]]
- [[#Traffic regime]]
Congestion regime
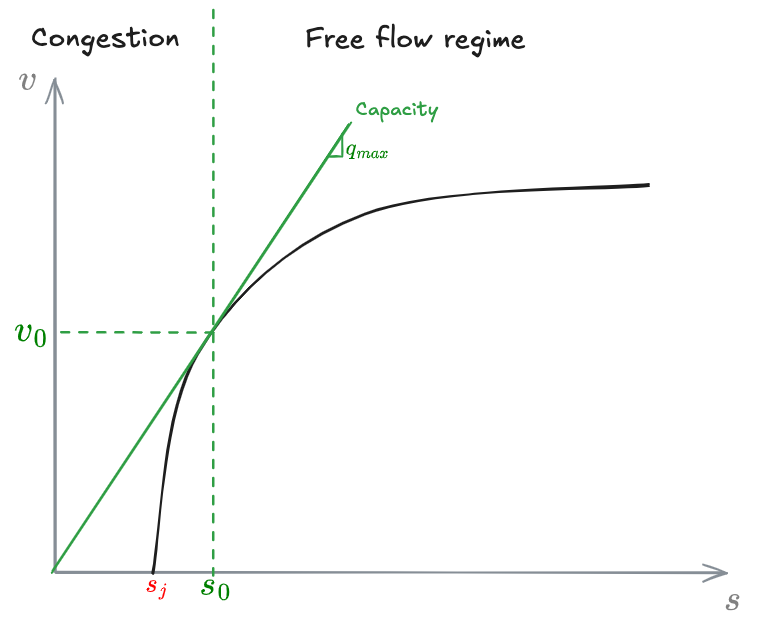
Free-flow regime
We have free flow traffic when we work on spacings (density) grater (less) than those relative to the capacity.
Congestion
We have congestion when we work on spacings (density) less (greater) than those relative to the capacity.
Traffic regime
Light traffic
We have light traffic when the speed is not dependent on the spacing or density
Heavy traffic
We have heavy traffic when the speed is dependent on the spacing or density
Density speed models
The first model was proposed by [[Bruce Greenshield]]. It's known as [[#Greenshield k-v model]]. We will see the following models:
- [[#Greenshield k-v model]]
- [[#Greenberg k-v model (1959)]]
- [[#Underwood k-v model (1961)]]
- [[#Edie k-v model]]
Greenshield k-v model
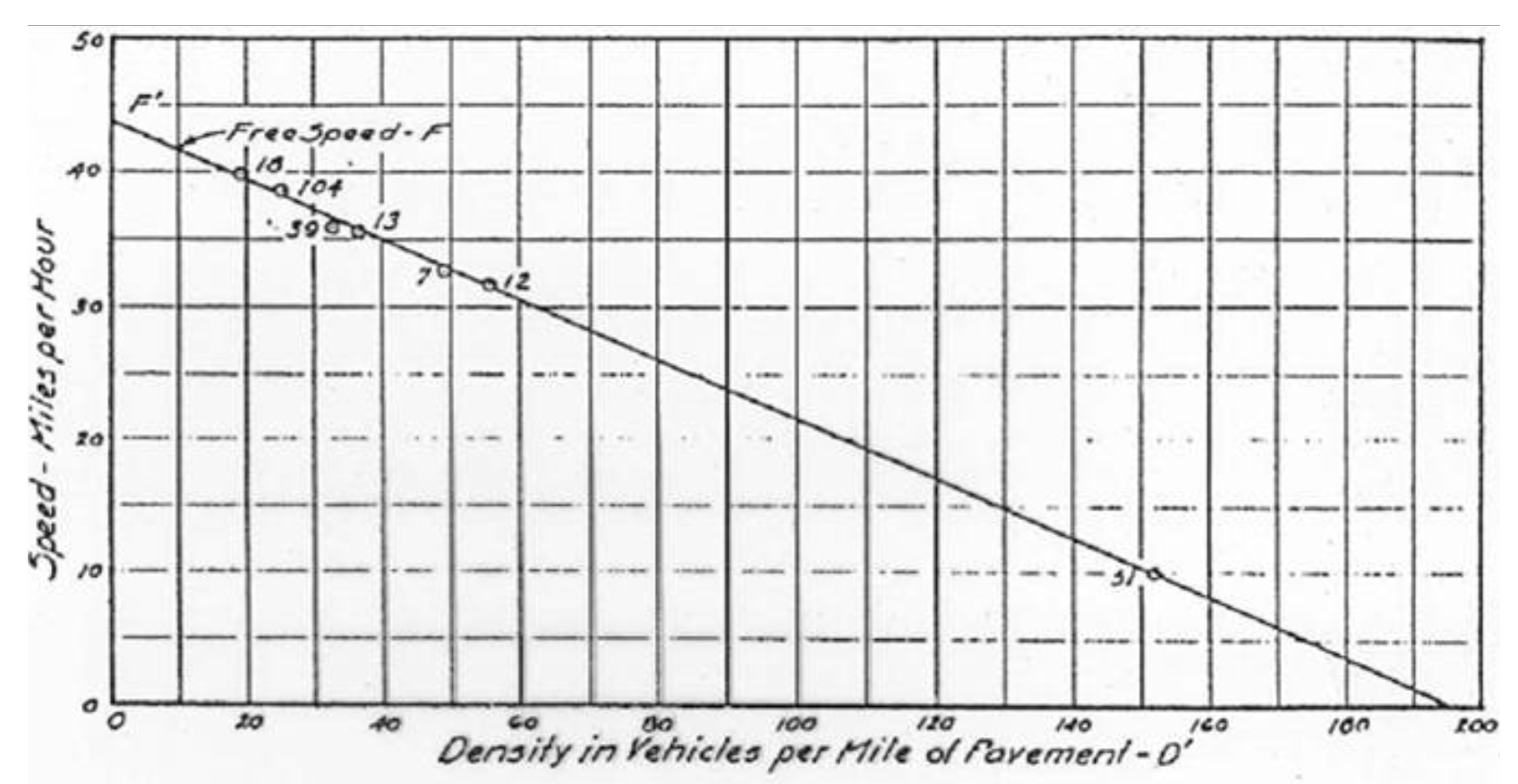
The figure above shows the original Greenshield k-v model. He described the average speed as a function of density, requaring 2 calibration parameters
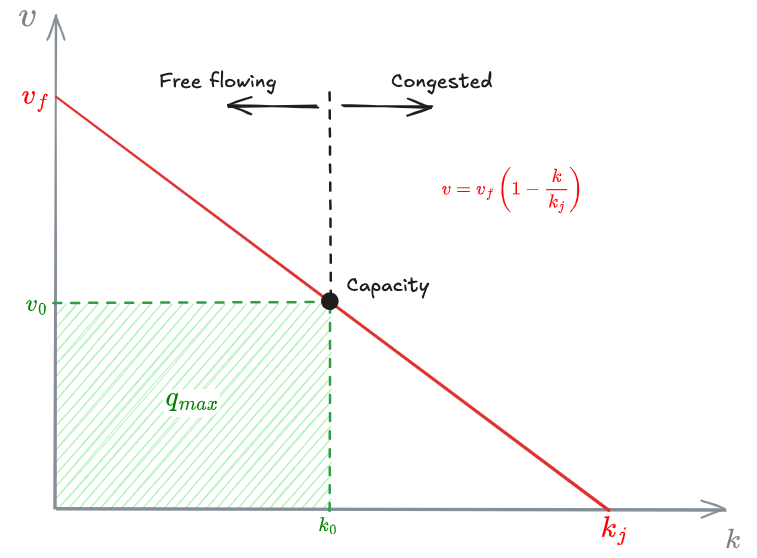
where:
Free flow speed - Speed at which vehicles travel when density is very low Jam density - Maximum density at the infrastructure when vehicles are in a gridlock jam, completely stopped
Given
The capacity point also distinguishes between two states:
- Congestion
- Free flowing
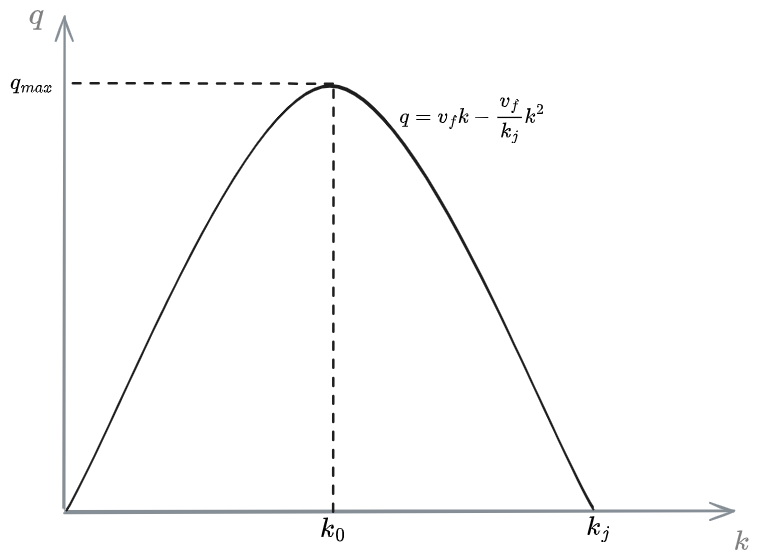
Combining the 2 equations:
To find the maximum of this funciton, we can derive and impose equal to 0:
So,
Greenberg k-v model (1959)
Greenberg, in 1959, proposed a model that works very well in the congested part of the diagram, but not so much in the free flow.
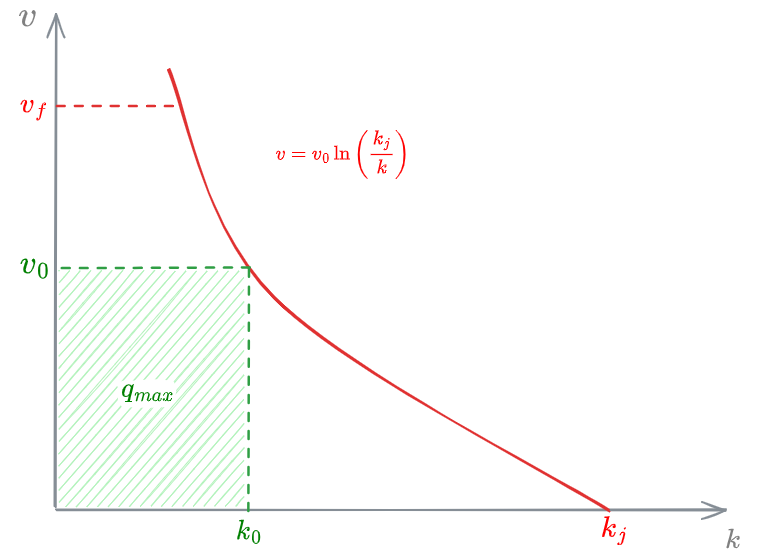
Since, mathematically, this model has velocity appriximating infinity for very low values of
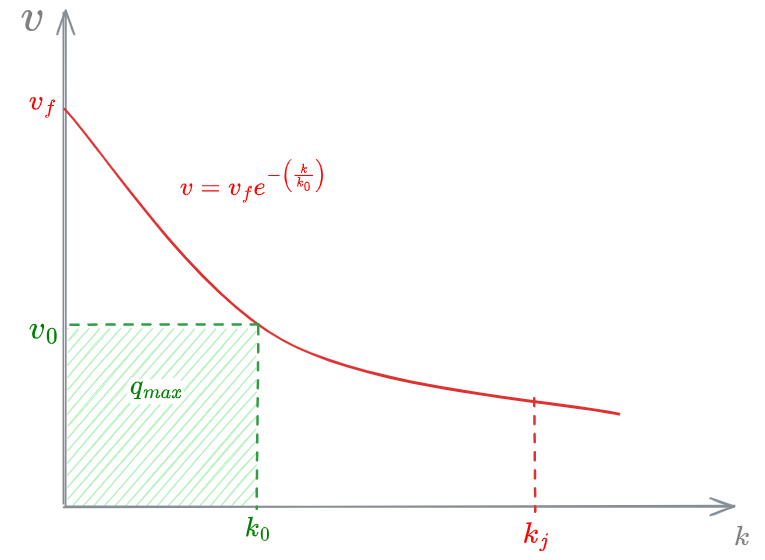
Underwood k-v model (1961)
Underwood, in 1961, proposed a model calibrated for free flow condition, but that doesn't work well in congestion
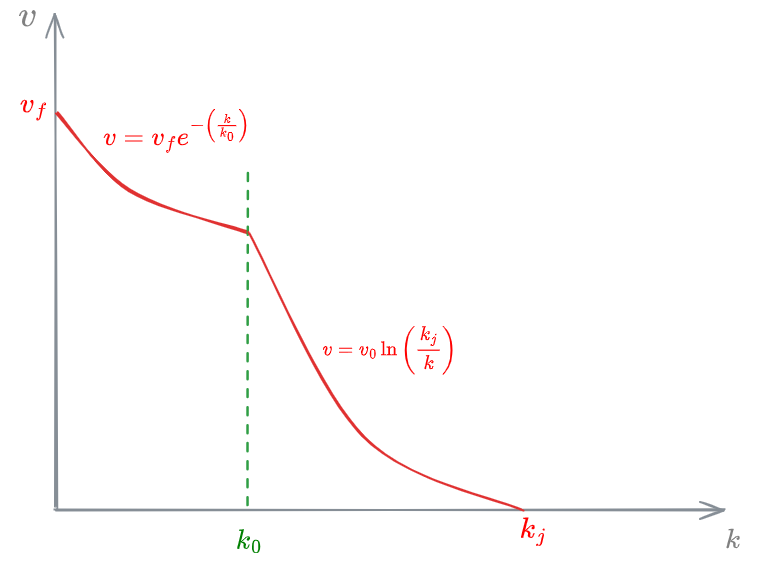
Edie k-v model
Edie, in 1961, decided to merge the [[#Greenberg k-v model (1959)]] and [[#Underwood k-v model (1961)]] in order to obtain one unique model that would work well for both free flow traffic and for congestion. This is simply the merging of the 2 functions cutoff at the capacity point
Traffic shock-wave
Whenever there is a change in the state of traffic, such as an acceleration or deceleration, the information of such change travels in traffic. The travel of information is referred to as a traffic shock-wave. This means that in different points in space and time, the change in traffic state happens only once the shock-wave reaches that point.
Traffic shockwave speed
Look at the trajectory diagram below. There are several vehicles travelling at speed
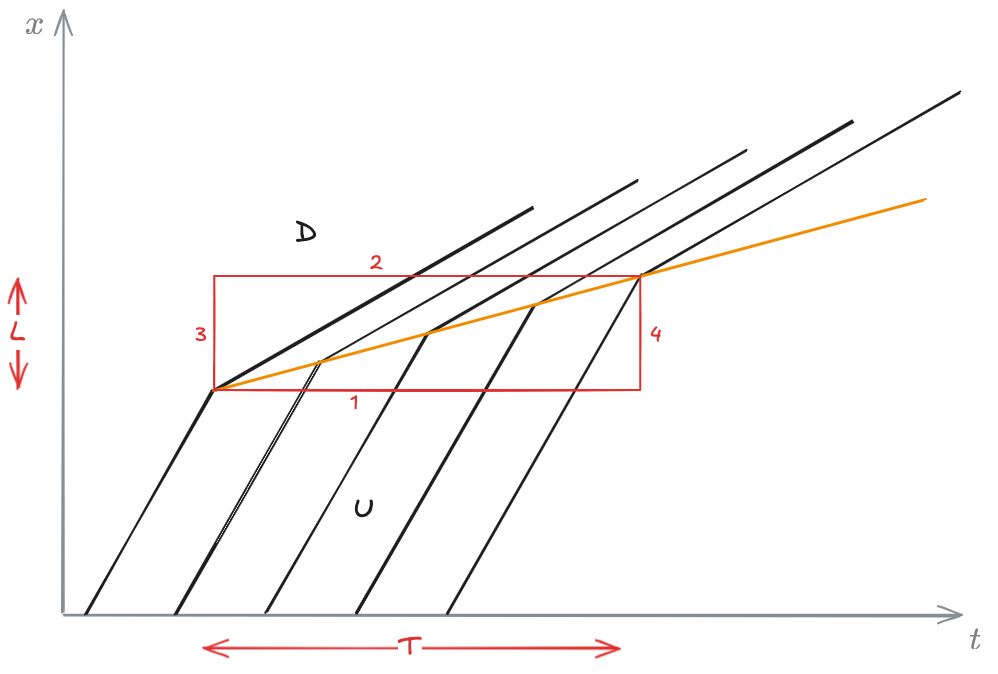
Let's apply the [[#Conservation of vehicles]] to the red square:
Let
So we get:
Dividing both members by
from which we find:
that is defined as the shockwave speed.
The speed of a traffic shock-wave between 2 stationary traffic states is determined by the increase in flow over the increase in density:
If:
wave travles in same direction of traffic wave travles in opposite direction of traffic
Fundamental diagram of traffic
The fundamental diagram of traffic is a density-flow diagram (
The typical shape of a fundamental diagram of traffic is the following:
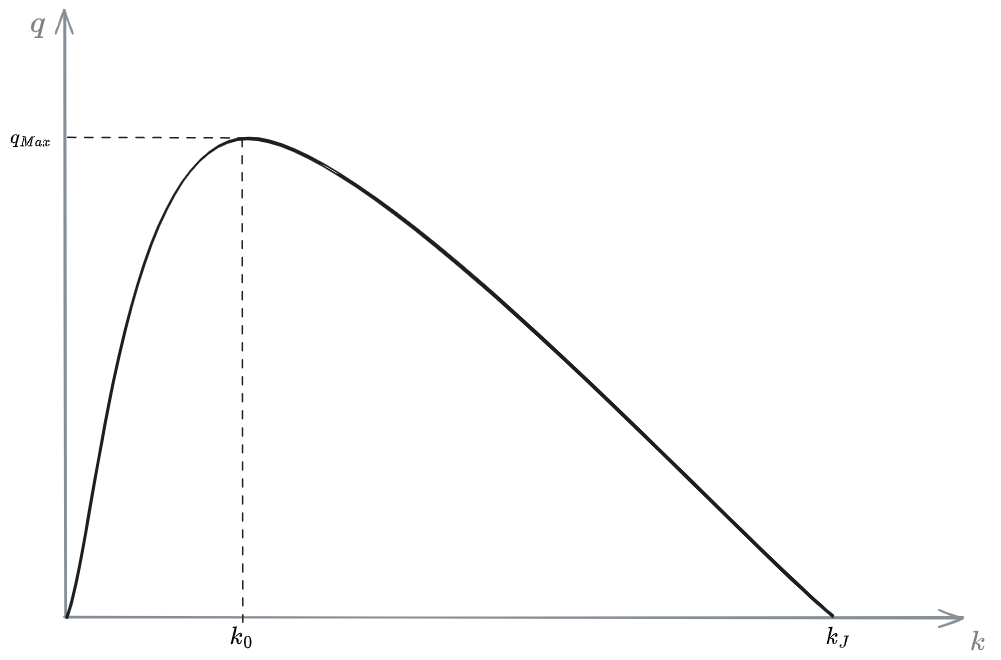
Traffic will be on any point of that curve and each point resembles a different traffic state.
A TRAFFIC STATE ON THE GRAPH
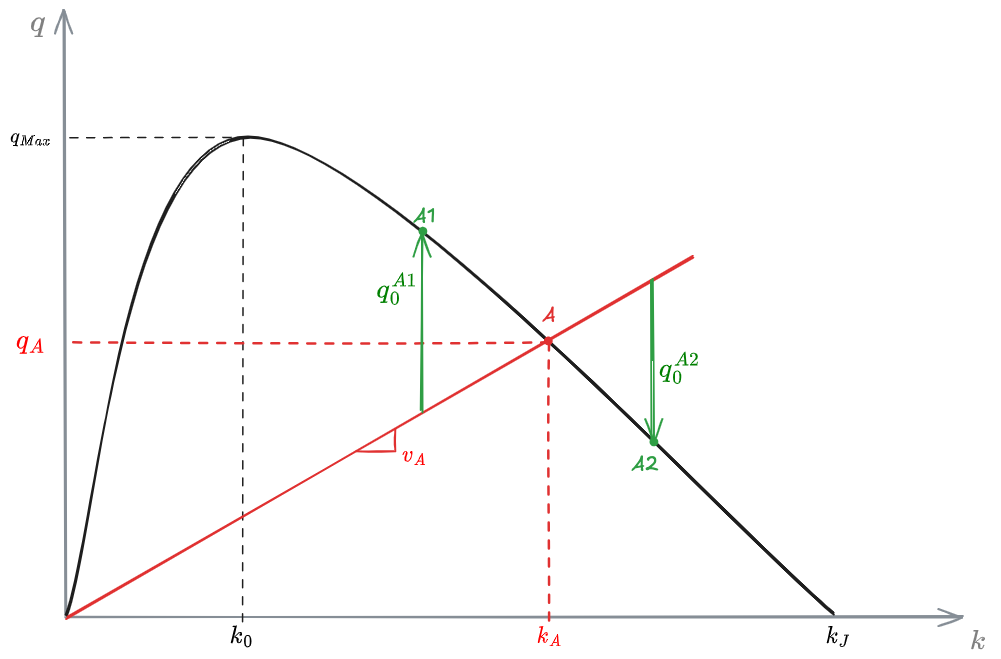
Look at traffic state A.
is the density in state is the flow in state
By definition, the speed can be found as. So:
This can be represented graphically by a line going through the origin and intersecting the diagram in point
RELATIVE FLOW
From the same graph we can also obtain the #Relative flow
between an observer traveling at speed
FREE FLOW AND CAPACITY
Let's look at some specific states on the fundamental diagram (FD):
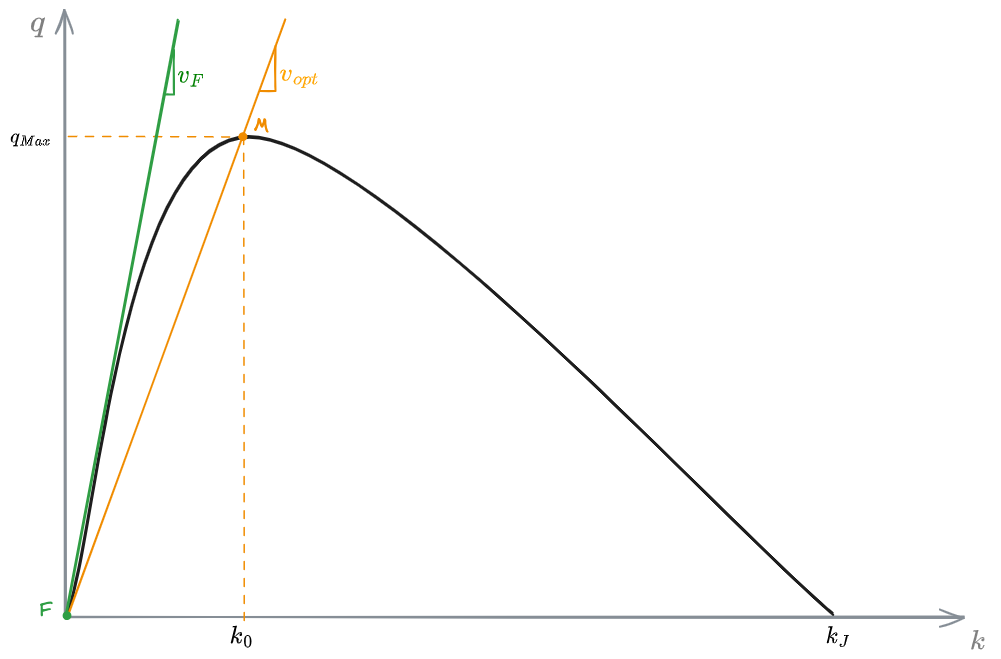
In the graph above 2 states are represented:
- Maximum flow - State M
- Free flow - State F
From the graph it's easy to gain the free-flow speed,
SHOCK-WAVE SPEED
Let's now imagine traffic moves from state A to state B. It would be, in this case, an acceleration.
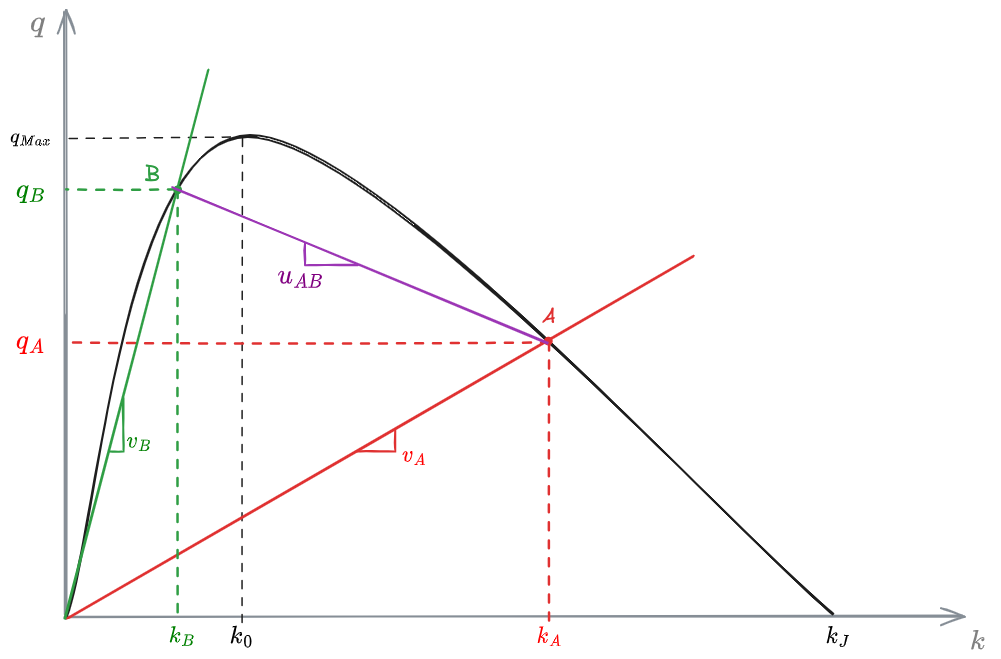
By definition,
Shocks and waves
The concept behind [[#LWR Traffic flow theory]] is that every change in traffic state causes a wave to be generated. If we're able to track the waves in space and time, we are then able to predict traffic evolution.
Just 2 situations are possible with traffic:
- #Acceleration - LWR
- #Deceleration - LWR
Acceleration - LWR
To study the acceleration transition, we will suppose a 1 lane road in which some vehicles are piled up behind a slow moving truck until time
At every differential speed change a #Traffic shock-wave is generated.
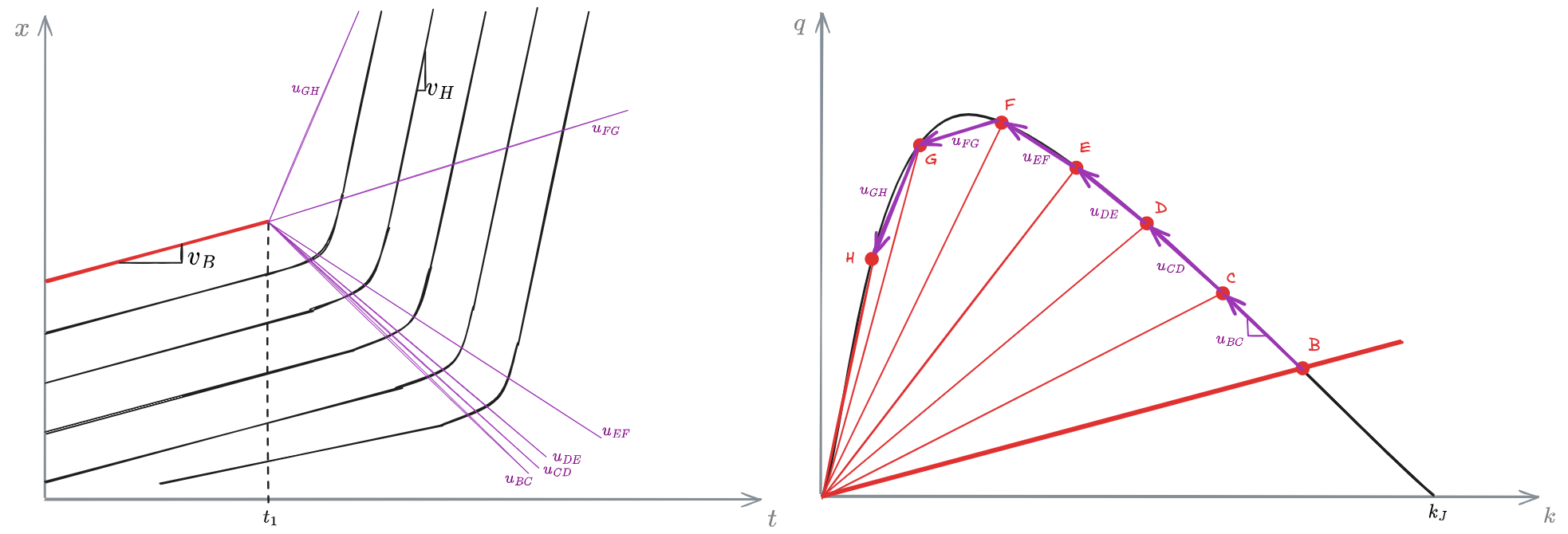
Each wave on the
Notice that since each step is theoretically differential, there are infinitely many shockwaves every time we go from one state to another.
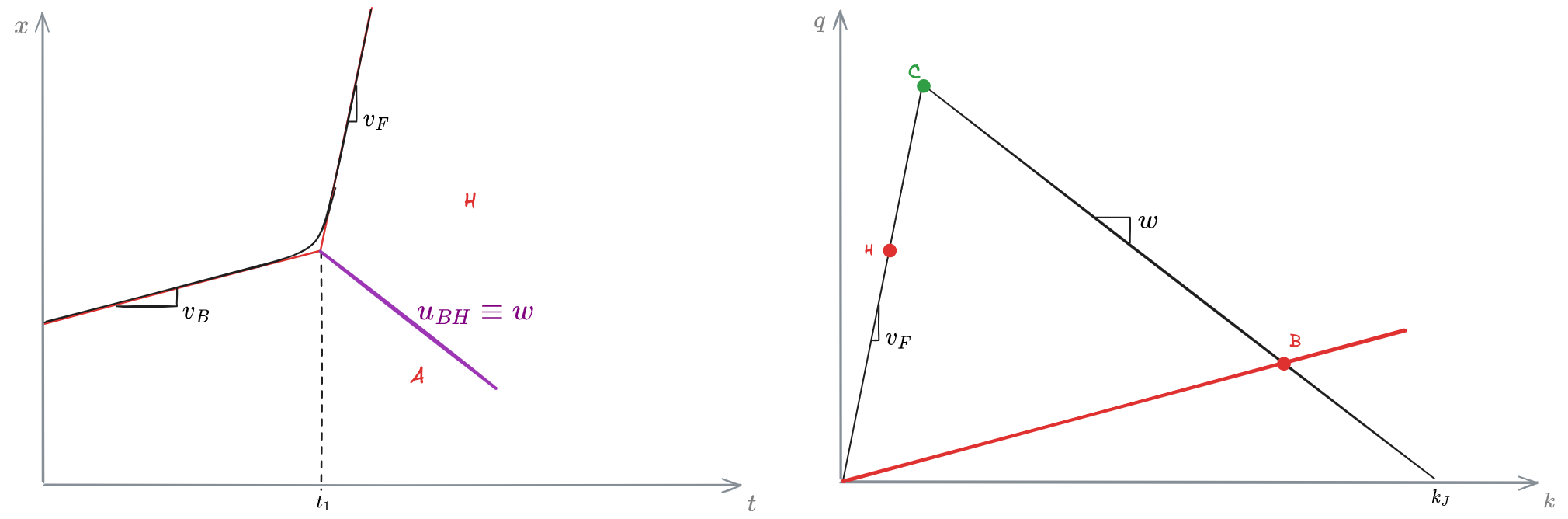
Deceleration - LWR
Now we just suppose that, on a stretch of road, vehicles are decelerating from speed
When 2 waves collide, it means that 2 very different traffic states are colliding without any smooth transition. This generates yet an other wave, known as shock.
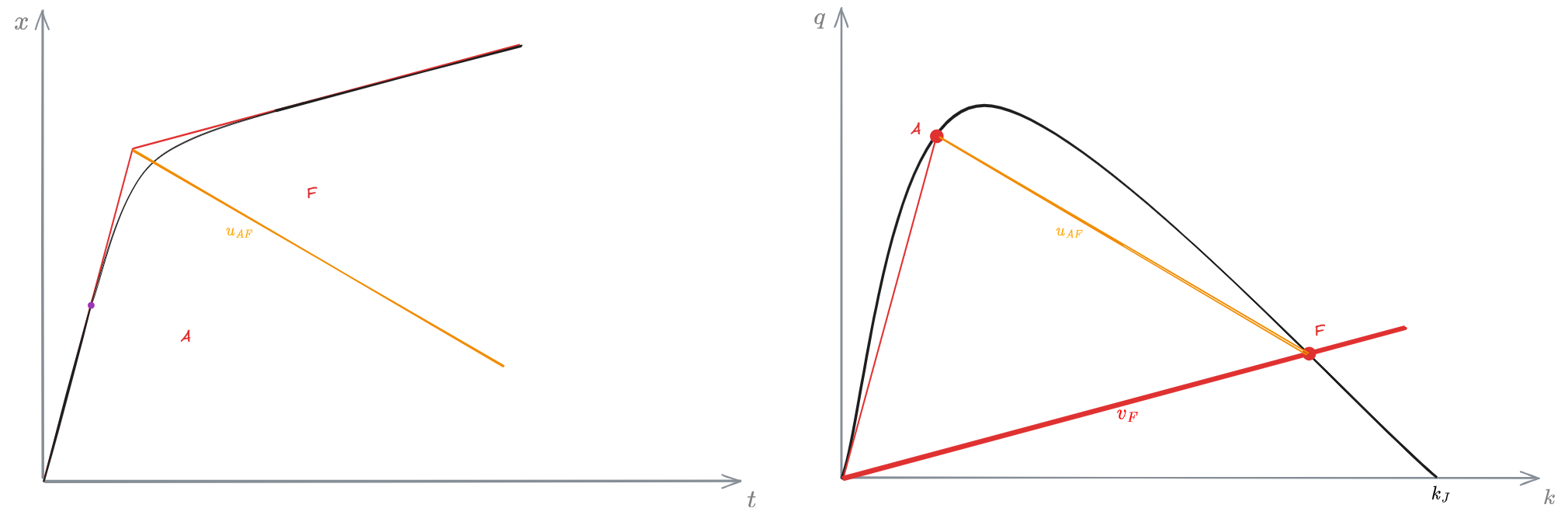
We will observe that initially there will be a smooth transition between state A and state F. Eventually though, only a single shockwave will remain changing abruptly from state A to state F.
Thinking of this in real life, when traffic slows down on a road, initially, the first cars have time to slow down gradually as the very first cause of the slowdown. As more cars arrive, the new ones will have less and less time to react until a point where one car is moving at free-flow speed until it finds the end of the queue that just formed.
LWR simplifications
From the explanation of #Shocks and waves it's clear that applying the model is not easy due to the infinitely many waves that generate between 2 states.
There are some simplifications that we can introduce to make things a lot easier. Specifically, we will add 2 assumptions:
Instantaneous accelerations/decelerations - LWR
We will consider every change in speed instantaneous. This means that, for each state change, only one #Traffic shock-wave is generated. This is particularly useful in #Deceleration - LWR, where infinitely many waves otherwise collide generating infinitely many shocks.
This assumption is actually quite justified when thinking that usually speed transition happen on a short time-span compared to the whole trajectory of a vehicle.
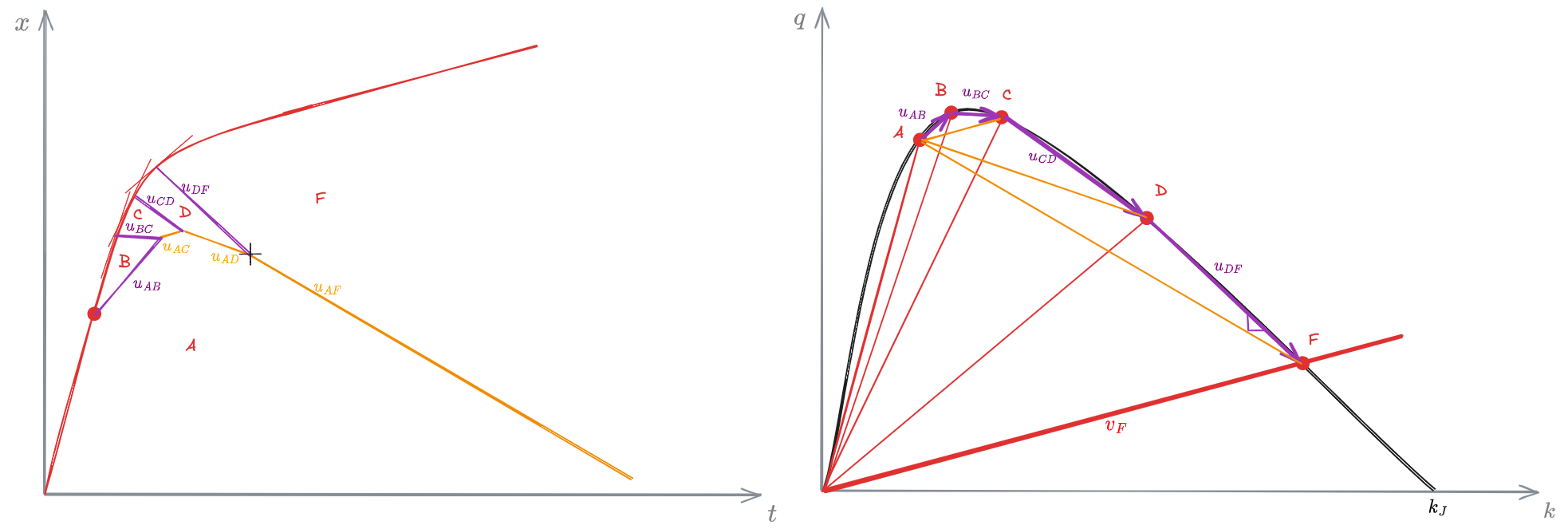
With this simplification, the graphs shown in #Deceleration - LWR will appear as the following:
This simplification still doesn't help much in accelerations, for which we need a new assumption: #Triangular fundamental diagram.
Triangular fundamental diagram
In the 1990 it was proposed to adopt a triangular #Fundamental diagram of traffic. This served 2 porpuses:
- It was shown to actually be more accurate in describing present traffic, except for the area near capacity where the real data showed a smother transition
- It made every state change in the two areas (#Congestion and #Free-flow regime) have the same #Traffic shockwave speed.
Now, the new state change, for #Acceleration - LWR, would look more like this
Now, in terms of waves, the state change
LWR Theory example
LWR theory limitations
- All vehicles are considered equal
- Avg behavior (no overtakes, all at same speed)
- Doesn't work well for light traffic
- Can't give much precision - all results should be approximated
graph comes from regression - We are considering changes from happening instantaneously --> waves should be considered to be thick lines
- Theory is not always stable
- In congested traffic speeds often fluctuate (stop and go), which is not predicted by this model